Hi there,
I was trying to follow the URDF tutorials but I am stuck on setting up to RVIZ.
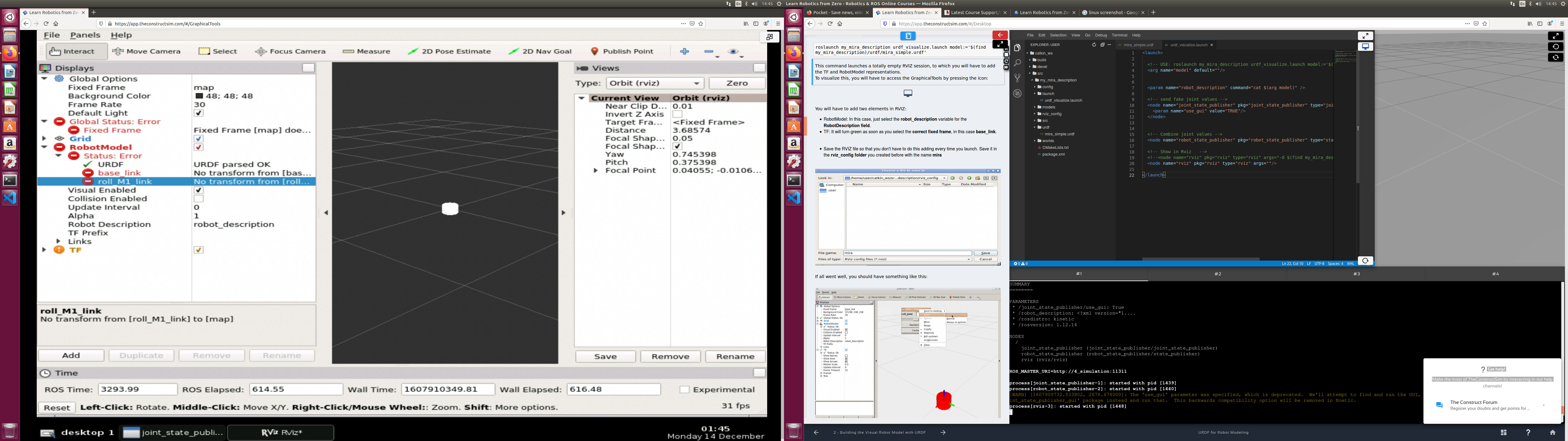
The Robot model cannot recognize TF for some reason.
What can I do?
Thanks.
Hi,
Take a look at the example image in the notebook. You see which frame is set? You have selected the wrong one ( map ). That frame doesn’t exist in that simulation and therefore TF can’t resolve ;).