Hi,
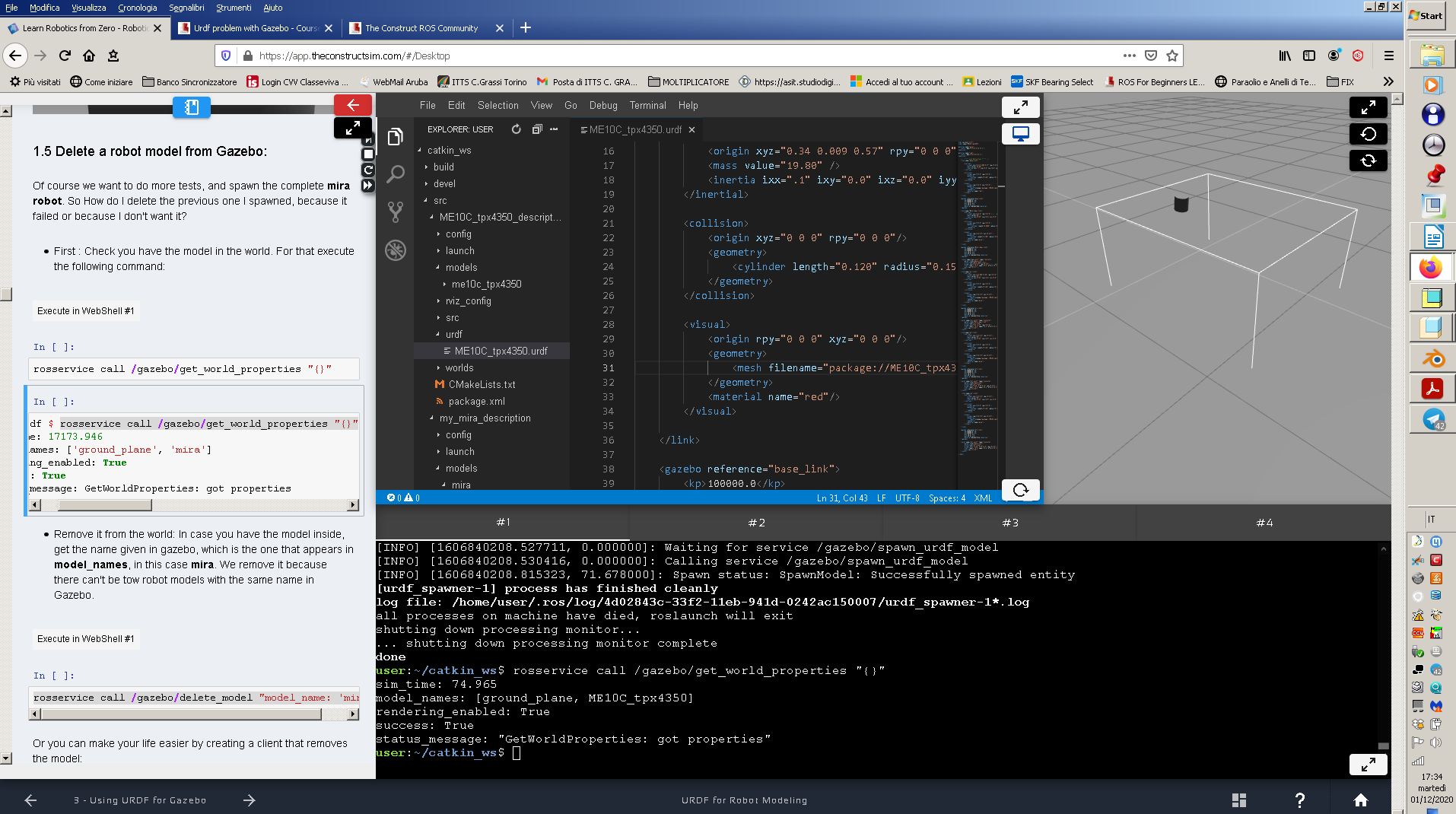
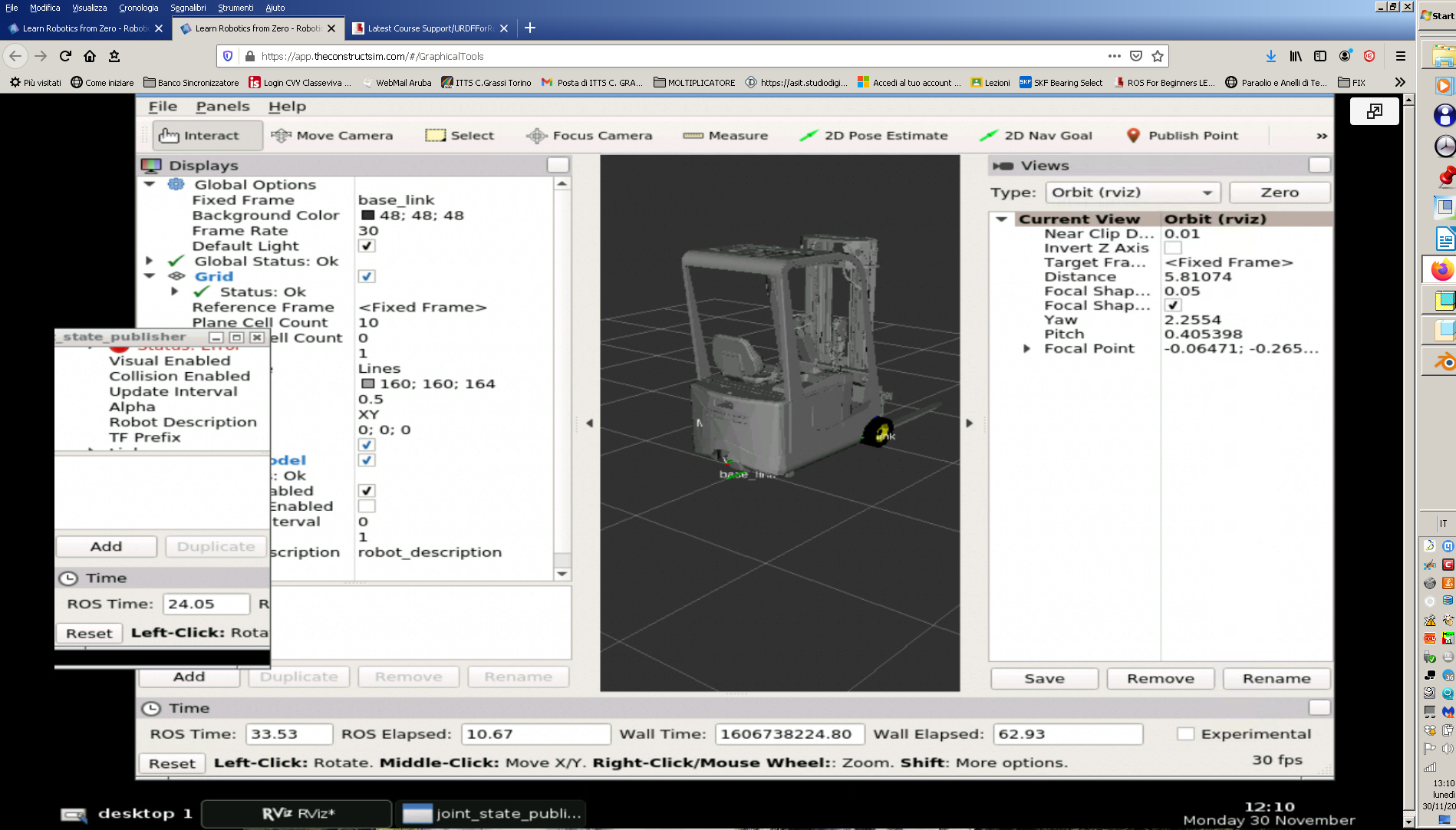
I tried to build a three-wheeled forklift from scratch. I generated stl with a cad and file.dae with blender. I assigned the colors to the right wheel via Blender itself. I was able to view in Rviz as the image shows. But if I try to spawn the urdf in Gazebo I don’t see anything, but the system returns:
I have attached the urdf file.
Any help is appreciated
Thanks
Salvatore <?xml version="1.0"?>
<!-- * * * Link Definitions * * * -->
<link name="base_link">
<inertial>
<origin xyz="0.34 0.009 0.57" rpy="0 0 0"/>
<mass value="198.0" />
<inertia ixx="1" ixy="0.0" ixz="0.0" iyy="1" iyz="0.0" izz="1"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/ME10C_tpx4350.dae"/>
</geometry>
</collision>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/ME10C_tpx4350.dae"/>
</geometry>
<material name="red"/>
</visual>
</link>
<gazebo reference="base_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Red</material>
</gazebo>
<link name="Motor_Gear_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/> <!-- posizione CoM rispetto SdR1 -->
<mass value="80" />
<inertia ixx="0.05" ixy="0.0" ixz="0.0" iyy="0.05" iyz="0.0" izz="0.05"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.100" radius="0.100"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.100" radius="0.100"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="Motor_Gear_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
</gazebo>
<joint name="yaw_joint" type="revolute">
<parent link="base_link"/>
<child link="Motor_Gear_link"/>
<origin xyz="0 0 0.5" rpy="0 0 0"/> <!-- posizione SdR1 del Motor_Gear_link -->
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="0 0 1"/>
</joint>
<link name="wrc_link">
<inertial>
<origin xyz="0 0.009 0.150" rpy="0 0 0"/>
<mass value="30" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wrc.dae"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wrc.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="wrc_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
</gazebo>
<joint name="wrc_joint" type="revolute">
<parent link="Motor_Gear_link"/>
<child link="wrc_link"/>
<origin xyz="0 0 -0.35" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
<link name="wfl_link">
<inertial>
<origin xyz="0 0.0 0" rpy="0 0 0"/>
<mass value="30" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wfl.dae"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wfl.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="wfl_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
</gazebo>
<joint name="wfl_joint" type="revolute">
<parent link="base_link"/>
<child link="wfl_link"/>
<origin xyz="0.38 -0.95 0.15" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
<link name="wfr_link">
<inertial>
<origin xyz="0 0.0 0" rpy="0 0 0"/>
<mass value="30" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wfr.dae"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ME10C_tpx4350_description/models/ME10C_tpx4350/meshes/wfr.dae"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="wfl_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
</gazebo>
<joint name="wfr_joint" type="revolute">
<parent link="base_link"/>
<child link="wfr_link"/>
<origin xyz="-0.38 -0.95 0.15" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>