Required Info:
- Operating System:
- Ubuntu Ubuntu 22.04 LTS
- Ros2 Humble
- Installation type:
- binaries
- Client library (if applicable):
- IncludeLaunchDescription of launch.actions
Steps to reproduce issue
test.launch.py →
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
ld = LaunchDescription()
default_launch_file_path = os.path.join(get_package_share_directory('robot_bringup'), 'launch')
start_test2_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(default_launch_file_path, 'test2.launch.py')
)
)
ld.add_action(start_test2_cmd)
return ld
test2.launch.py →
import os
from launch import LaunchDescription
def generate_launch_description():
ld = LaunchDescription()
print("I only need to run once.")
return ld
Expected behavior
bluebird@bluebird-Jammy:~/Documents/InClassProjects/turtle_bot_ws$ ros2 launch robot_bringup test.launch.py
[INFO] [launch]: All log files can be found below /home/bluebird/.ros/log/2022-06-17-10-17-38-337096-bluebird-Jammy-22777
[INFO] [launch]: Default logging verbosity is set to INFO
I only need to run once.
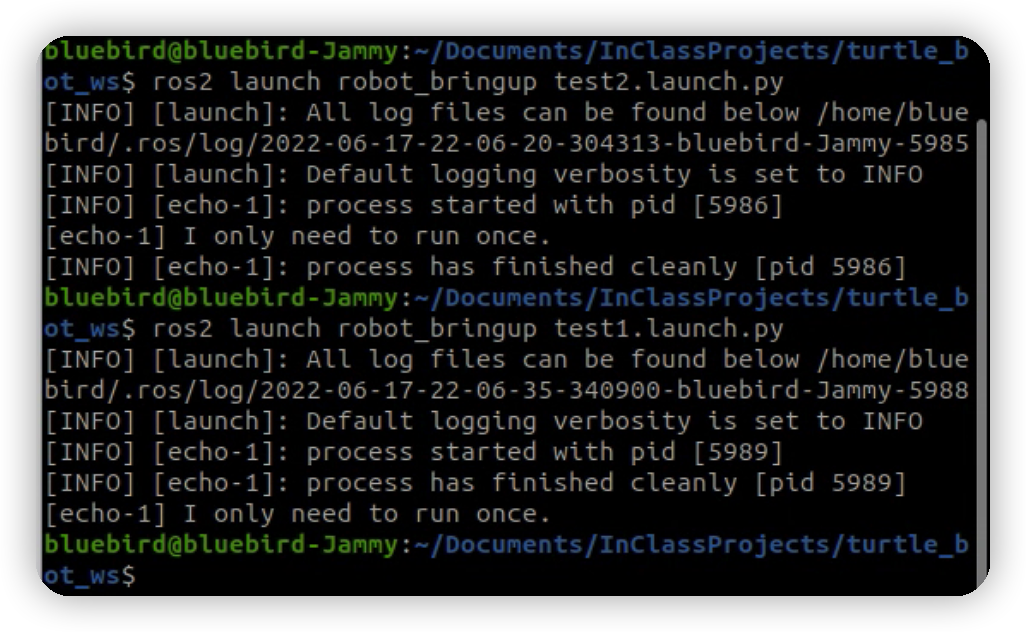
Actual behavior
bluebird@bluebird-Jammy:~/Documents/InClassProjects/turtle_bot_ws$ ros2 launch robot_bringup test.launch.py
[INFO] [launch]: All log files can be found below /home/bluebird/.ros/log/2022-06-17-10-17-38-337096-bluebird-Jammy-22777
[INFO] [launch]: Default logging verbosity is set to INFO
I only need to run once.
I only need to run once.