Hi, I am studying ROS with Kuka Kr6r900sixx through this (https://github.com/SebNag/kuka_kr6r900sixx_moveit_gazebo_setup)
and I also saw this Youtube Video : https://www.youtube.com/watch?v=IC33SOa3qQE
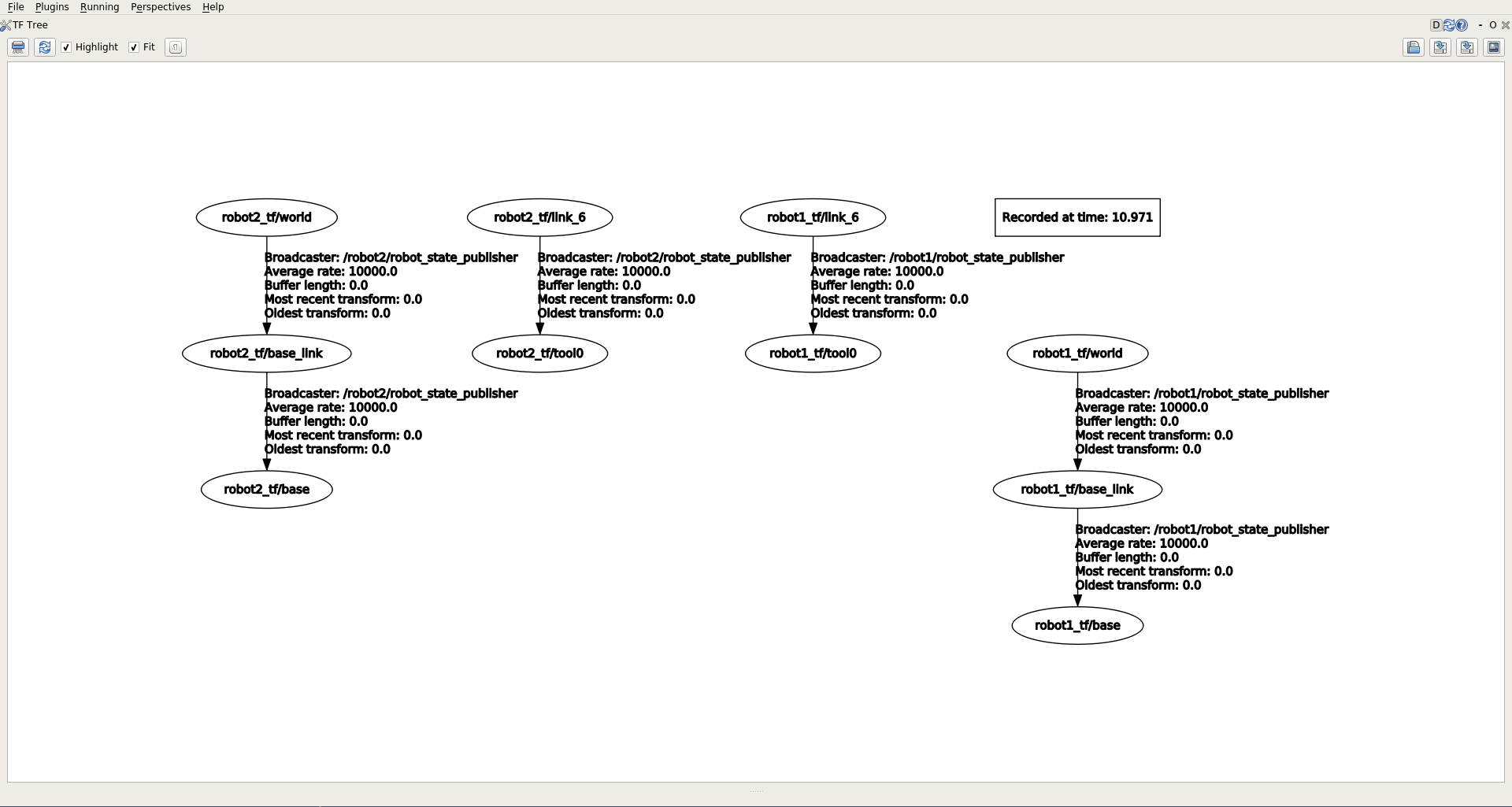
when I started to spawn two kuka robot , there is two issues broke out.
first, I can’t find my (namespace)/link 1,2,3,4 …
I think this issue came from “robot_state_publisher” can not read tf
Second,
‘Tried to advertise a service that is already advertised in this node
[/controller_manager/reload_controller_libraries]’ error occur when I start my start.launch
here is my source code, no audit just refer and use upload git link kuka sources
1.start.launch
2.kr6r900sixx_robot.launch
<?xml version="1.0" encoding="UTF-8"?><arg name="limited" default="false" doc="If true, limits joint range [-PI, PI] on all joints." />
<arg name = "robot_name" />
<arg name = "x" default ="0.0" />
<arg name = "y" default ="0.0" />
<arg name = "z" default ="0.0" />
<arg name = "roll" default ="0.0" />
<arg name = "pitch" default ="0.0" />
<arg name = "yaw" default ="0.0" />
<!-- remap topics to conform to ROS-I specifications -->
<remap from="$(arg robot_name)/arm_controller/follow_joint_trajectory" to="$(arg robot_name)/joint_trajectory_action" />
<remap from="$(arg robot_name)/arm_controller/state" to="$(arg robot_name)/feedback_states" />
<remap from="$(arg robot_name)/arm_controller/command" to="$(arg robot_name)/joint_path_command"/>
<!-- urdf xml robot description loaded on the Parameter Server, converting the xacro into a proper urdf file-->
<!-- include file="$(find kuka_kr6_gazebo)/launch/load_kr6r900sixx.launch" /-->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find kuka_kr6_gazebo)/urdf/kuka_kr6r900sixx.xacro'" />
<node name="spawn_gazebo_model"
pkg="gazebo_ros"
type="spawn_model"
respawn="false"
output="screen"
args="
-urdf
-param robot_description
-model $(arg robot_name)
-x $(arg x)
-y $(arg y)
-z $(arg z)
-R $(arg roll)
-P $(arg pitch)
-Y $(arg yaw)
" />
<!-- convert joint states to TF transforms for rviz, etc -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"
output="screen">
</node>
<!-- init and start Gazebo ros_control interface -->
<include file="$(find kuka_kr6_gazebo)/launch/kr6r900sixx_control.launch"/>
pz,help if you now about this issue… thanks…