Hi,
I’m trying to figure out the axis for each of the upperleg_joint’s in gurdy, but I am not able to understand the data quite clearly.
The links and joints image shared in the notebook has this part:
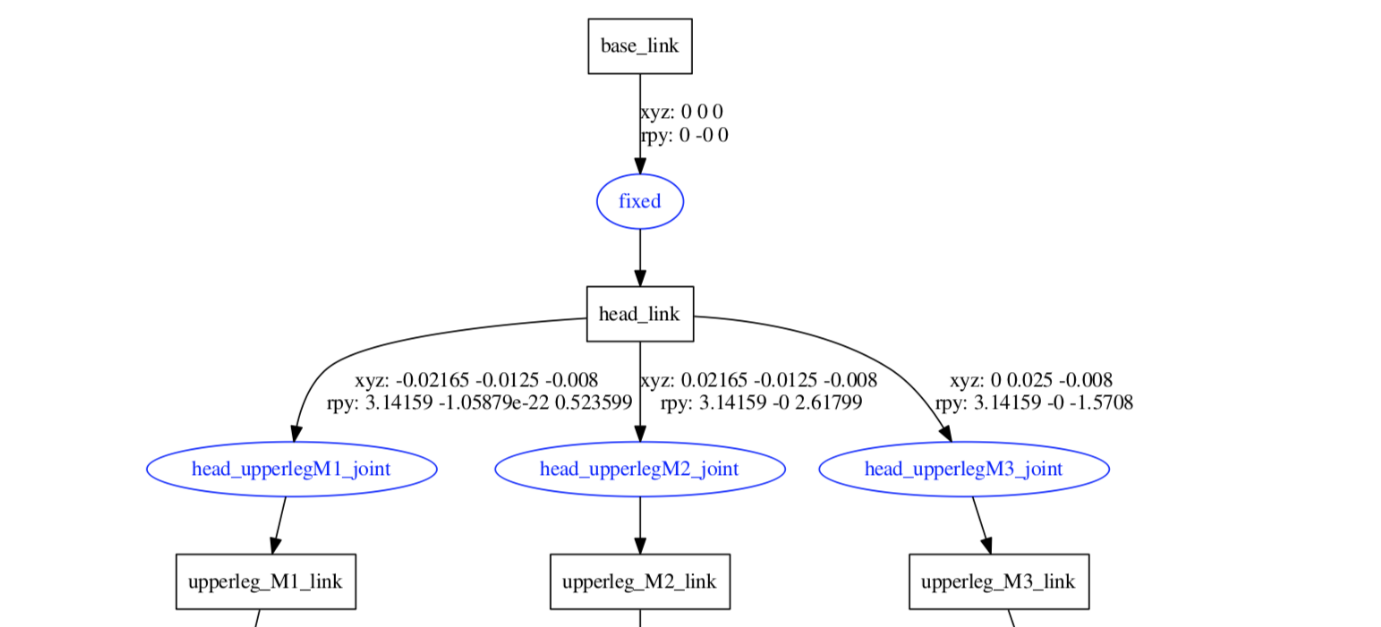
From the above picture, To my understanding the xyz near each of the upperleg_joints is the position of their origin with respect to the head_link origin.
But we are also provided another picture of the robot in the XZ Plane with the following text:
Here you have a blueprint of the distances to place the most difficult part, which is the joints between the head and the legs. The units are millimeters:
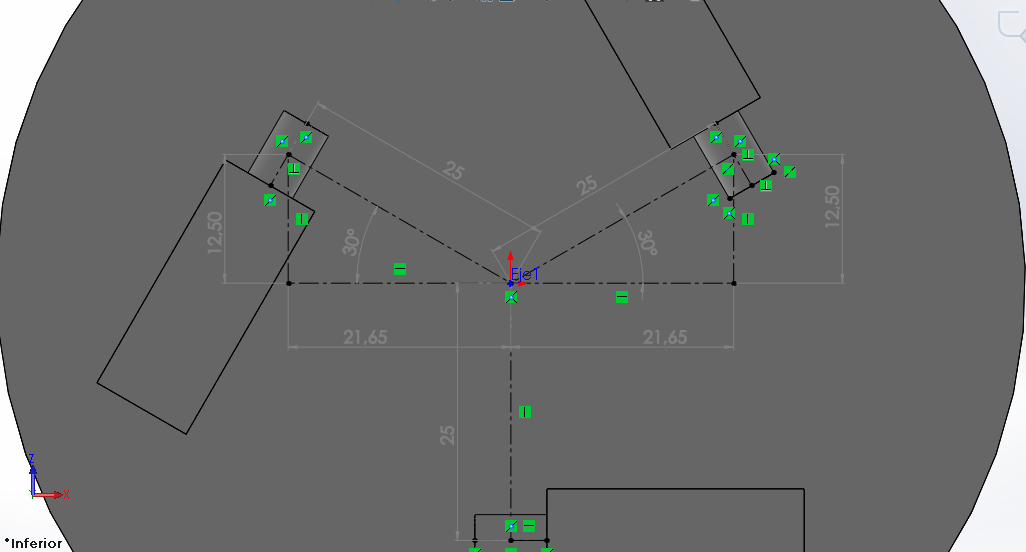
The X Z coordinates of the upperleg_joint origins from the 2nd image do not match with the ones from the 1st image.
For example:
The 1st Image has one of the joint coordinates to be (0 0.025 -0.008) this is one of the only joint origins to have an x=0 so it would be a fair assumption to guess that its located at the lower end of the 2nd Image, but only the x coordinates match, the z coordinates according the 2nd Image should be -0.025 and not -0.008 as given in the 1st image.
I’m not really sure if I am assuming something wrong or if there is inconsistency in the data.
Any help would be highly appreciated.
TIA