Hi experts @staff, I am sorry to trigger you every time, but I really use this feature when my attempts have run out!
So I was trying to add light or led to my robot. To be honest I found the website which you recommended on the final of the exam very complex, because it is all in C++ (My limitation), and I am working using Python. So I have searched deeply and found an “easier” tutorial here from Open source Robotics Foundation: https://bitbucket.org/osrf/subt/wiki/tutorials/AddLights
I was really excited to do that. However the topic “light” does not appear. This is because on the beginning of Tutorial, they say that it is mandatory to have as a dependency the subt_gazebo pkg.
And then I downloaded and compiled this pkg from source, considering that it is not possible with Sudo apt-get (it is not provided).
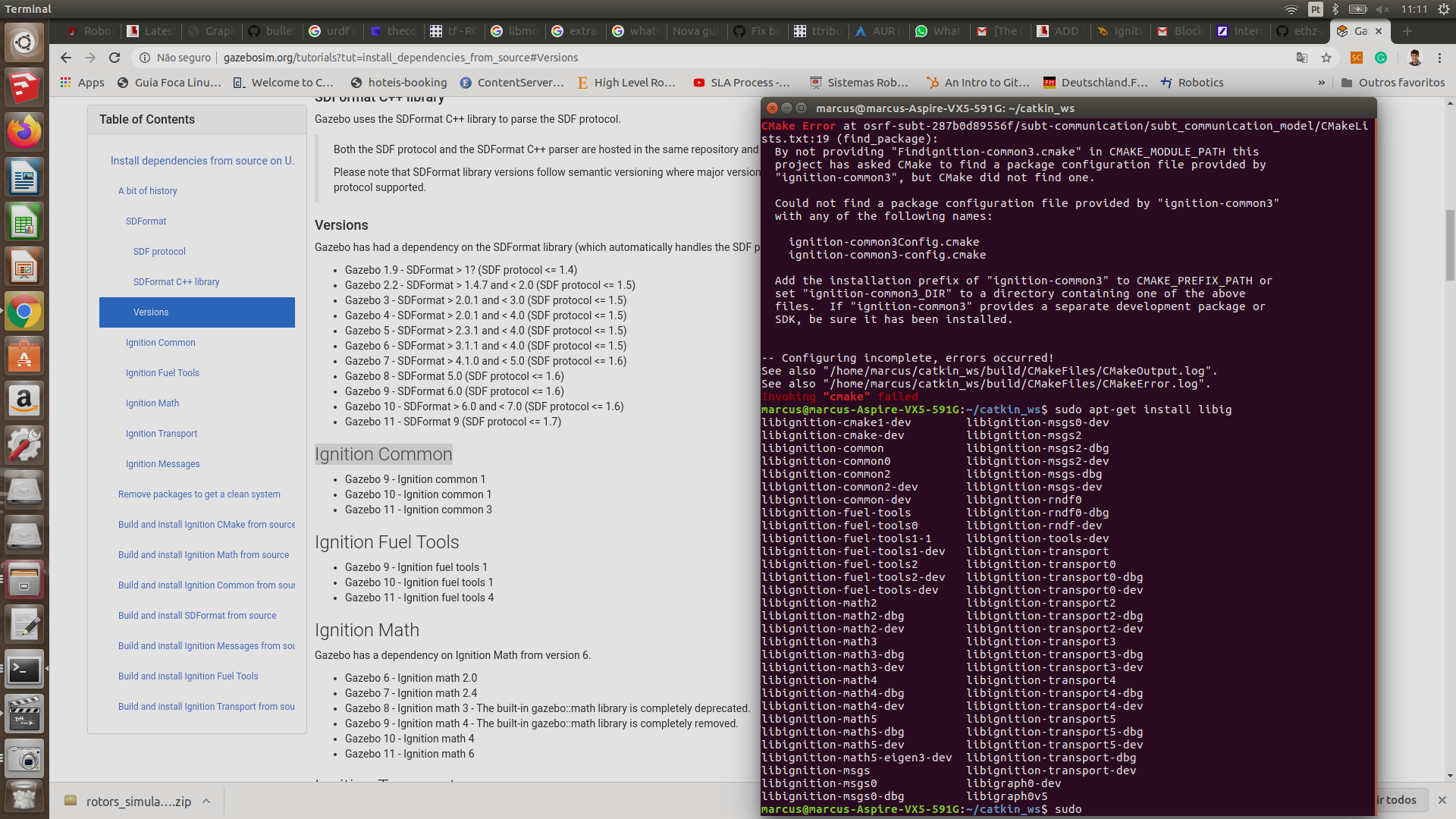
Ok this Package is very huge, and I am having a dependency issue, which I could not solve alone because I did not find any pkg to compile:
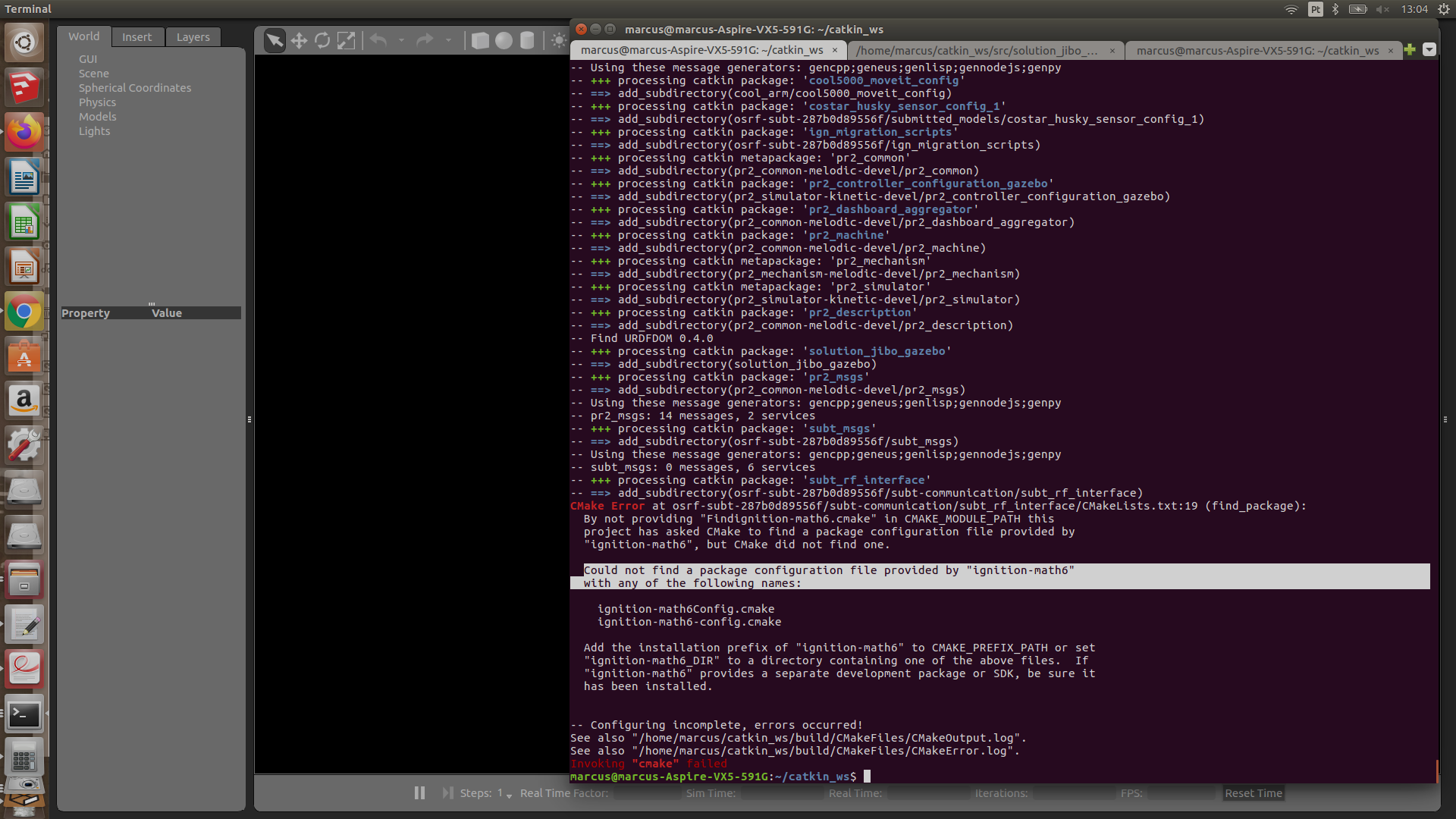
So what is this error about? how to solve it? Because without solving this issue I think I cannot run the plugin. I have downloaded all the OSRF repository https://bitbucket.org/osrf/gazebo/downloads/
However, I did not find a pkg written specifically subt_gazebo.
What path should I follow in order to be able to add light to Jibo?
obs: After adding this snippet of code (plugin) to my urdf and adjust it to it, the Gazebo did not open the scenario anymore, instead the URDF keep correctly being produced by using the tool “check_urdf”
-
<! – Led Plugin -->
-
<gazebo> -
<pose>0 0 0.5 0 0 0</pose> -
<link name='light_link'> -
<visual name='light_source'> -
<pose>0 0 0 0 0 0</pose> -
<geometry> -
<sphere> -
<radius>0.025</radius> -
</sphere> -
</geometry> -
<material> -
<ambient>1 1 1 1</ambient> -
<diffuse>1 1 1 1</diffuse> -
<specular>1 1 1 1</specular> -
<emissive>0 0 0 1</emissive> -
</material> -
</visual> -
<light name='light_source' type='point'> -
<pose>0 0 0 0 0 0</pose> -
<attenuation> -
<range>0.20</range> -
<linear>0.10</linear> -
</attenuation> -
<diffuse>0 0 0 1</diffuse> -
<specular>0 0 0 1</specular> -
</light> -
</link> -
<plugin name='light_control' filename='libRosFlashLightPlugin.so'> -
<service_name>enable</service_name> -
<light> -
<id>light_link/light_source</id> -
<enable>false</enable> -
<duration>1</duration> -
<interval>0</interval> -
<color>1 1 1</color> -
</light> -
</plugin> -
<parent>head_link</parent> -
<child>light_model::light_link</child>
Thanks in advance