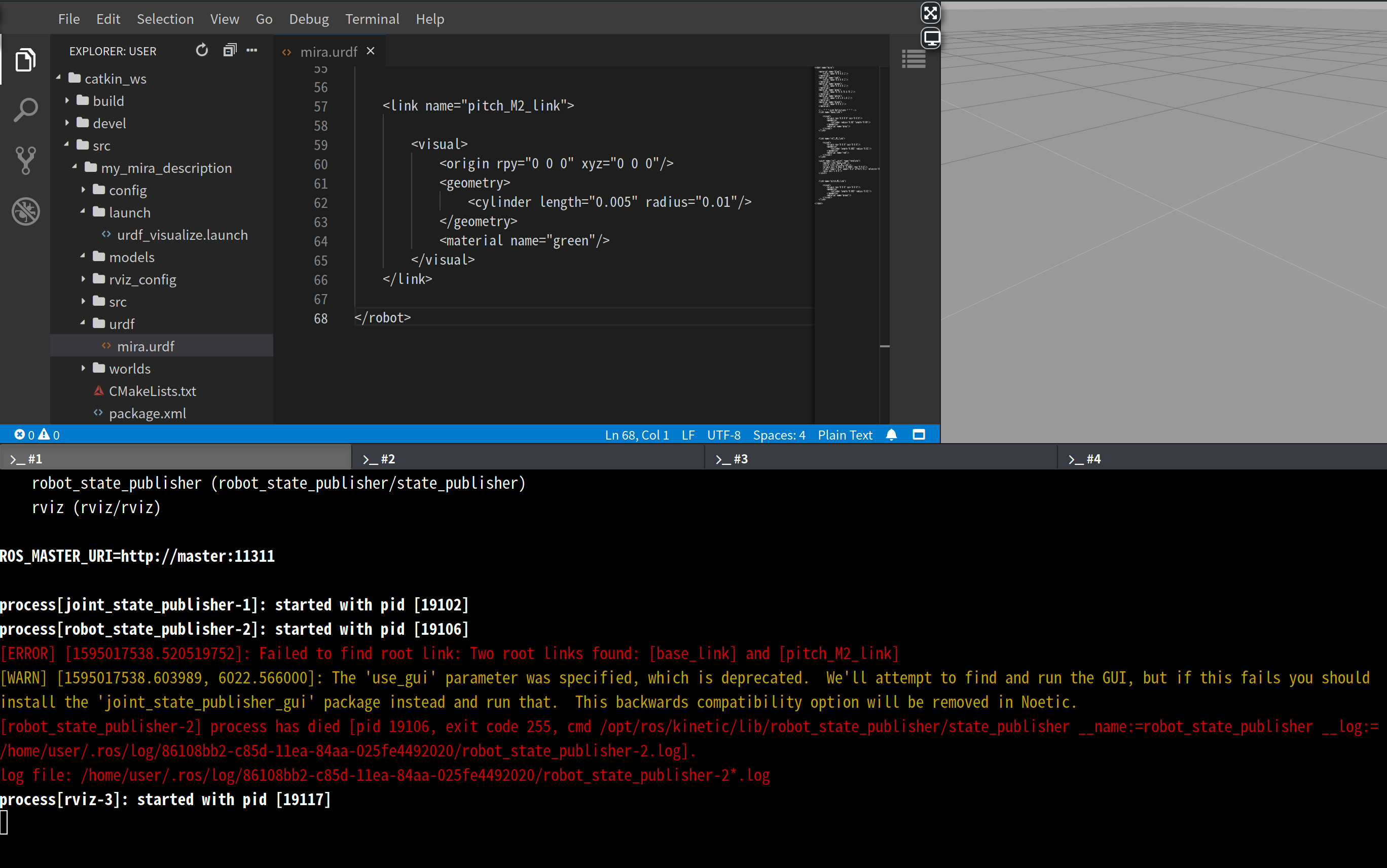
According to the Folie,I do it step by step. But it show me a Error and WARN, and at sametimes nothing be showed on Graphical Interface.
whaat shold I do now
Hi @weizhenyu1556
Like the error says, you have two root links. Only one link can be the root link. So if you have multiple links, you have to connect them with a joint
Suppose I have a moving object. Then, how would I define the root link? Since the object is moving and the root link cannot have inertia, how can I link the root link with the moving body?
I can have a sphere rolling on the ground, or have a walking bot: what sort of joint can I make?