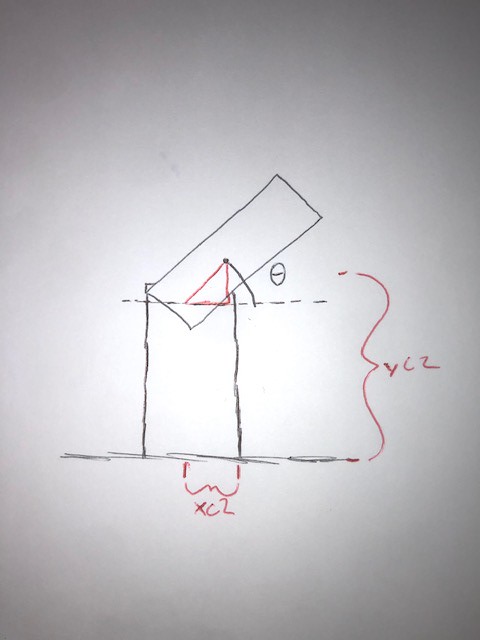
Is my understanding of the problem given in exercise 3.1 wrong? I can’t wrap my head around why xc2 is found using the sin() of theta. Shouldn’t this be cos()?
2 links are drawn for simplicity
Is my understanding of the problem given in exercise 3.1 wrong? I can’t wrap my head around why xc2 is found using the sin() of theta. Shouldn’t this be cos()?
2 links are drawn for simplicity
Hello @daniel.v.molina1 ,
Yes, you are right, it looks like a typo. I’ve just updated this in the notebook.
No, this was right originally. xc2 is found using the sin() of theta because the x axis is pointing left/right, but theta = 0 is pointing up. Theta is initially 0, so the theta component of xc2 should originally be 0, since theta is 0. If you use cos(theta), the theta term of xc2 is not initially 0, which is definitely wrong.
It’s also clear that the diagrams provided in the solution are wrong, since the last diagram violates the conservation of energy. The energy should be exchanging back and forth between kinetic and potential (with the sum slightly decreasing due to energy converted to heat by friction). The solution energy graph looks like the top plot:
As you can see, this plot seems to indicate that the sum of kinetic and potential energy is sometimes increasing, which is blatantly wrong.
However, if you plot the energy curves using the correct formula for the positions of the centers of mass, you get the bottom plot.
With the correct plot, you can see that the sum of the kinetic and potential energy is gradually decreasing, which it should be, due to energy converted to heat by friction.
Finally, the provided solution does not satisfy vx = d/dx + dx/dtheta. The velocity terms in the solution are right; they’re just the derivatives of the correct positions, which are different from the positions that the solution calculates.
The correct code should be:
xc2 = x2 + 0.5 * sin(th2)
yc2 = y2 + 0.5 * cos(th2)
xc3 = x3 + 0.5 * sin(th3)
yc3 = y3 + 0.5 * cos(th3)
vxc2 = vx2 + 0.5 * cos(th2) * w2
vyc2 = vy2 - 0.5 * sin(th2) * w2
vxc3 = vx3 + 0.5 * cos(th3) * w3
vyc3 = vy3 - 0.5 * sin(th3) * w3
Please change it back.