Hello, im having a lot of troubles to implement the upper body detector and some others detectors in my own linux system. And i dont know how to solve this. The main problem is that it does not detect anything.
Hi,
This could be due to many things.
- The image is note in he resolution high enough
- The tpics you are using are not well maped and he system is not getting any data really.
Pleas epost your code, create a simulated example that you can share with the community throough ROSDeveleopmene studio.¡for example. That would help a lotto help you debbug.
Thank you for the response, i will do so. Now its very messy
Hi @duckfrost,
I tryed to isntall strands_perception_people in Ros Development studio but i cant do it. i dont know why it does not found the dependencies of some of the packages.
Im using rbkairos with some packages to do the slam (its the project i am doing), then an intel realsense d435 (https://github.com/pal-robotics/realsense_gazebo_plugin) and i merged it toghether in a simulation enviroment.
The upper_body_detector y conected to the topics but no detection.
If you can help me to upload the upper_body_detector and the ground_plane to the rosdevelopment studio would be awesome
Here is an image of the simulation in rviz
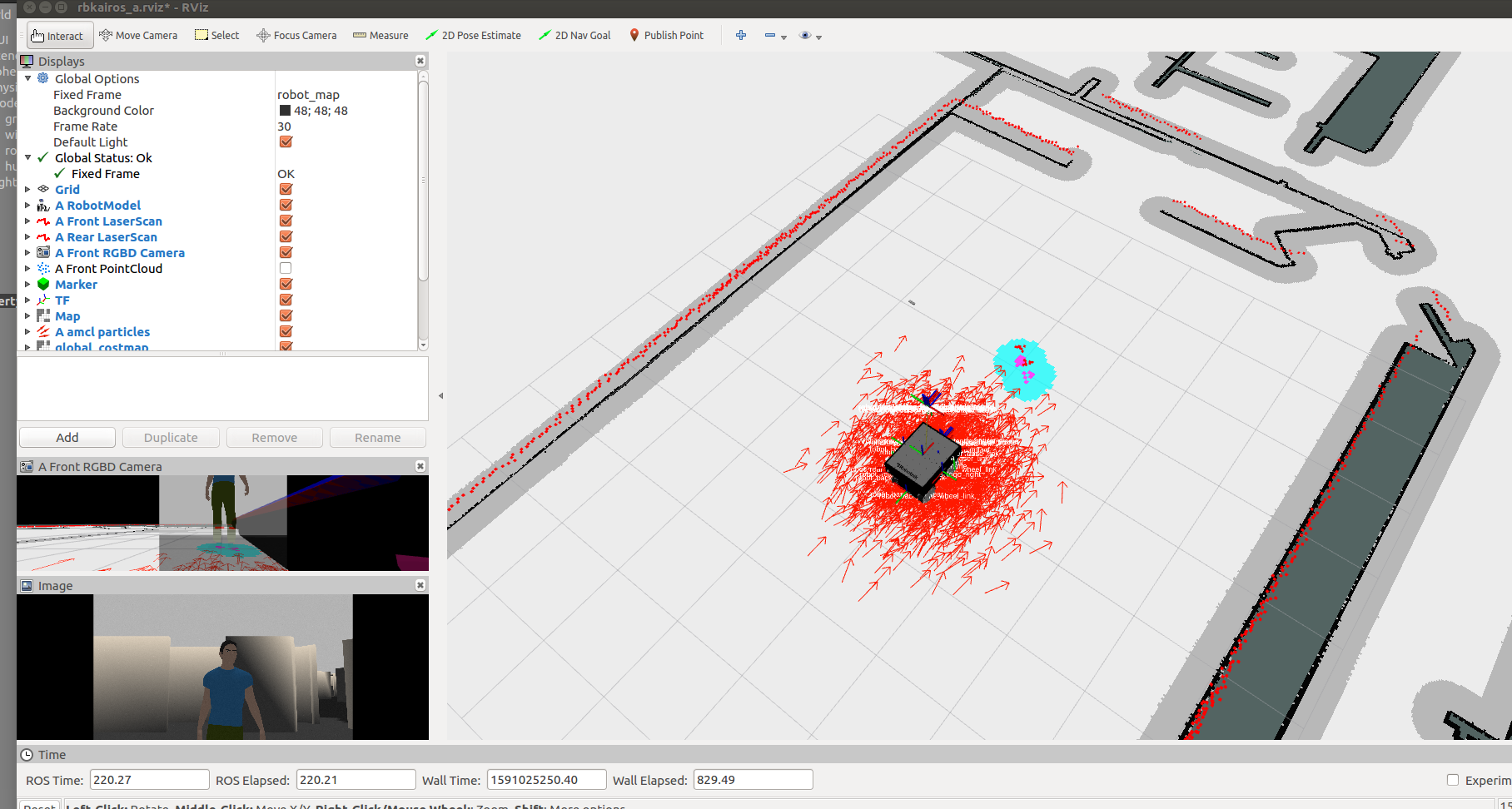
i cant upload the gazebo image because im new user
And the upper body detector:
Node [/upper_body_detector]
Publications:
- /rosout [rosgraph_msgs/Log]
- /upper_body_detector/bounding_box_centres [geometry_msgs/PoseArray]
- /upper_body_detector/closest_bounding_box_centre [geometry_msgs/PoseStamped]
- /upper_body_detector/detections [upper_body_detector/UpperBodyDetector]
- /upper_body_detector/image [sensor_msgs/Image]
- /upper_body_detector/image/compressed [sensor_msgs/CompressedImage]
- /upper_body_detector/image/compressed/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/image/compressed/parameter_updates [dynamic_reconfigure/Config]
- /upper_body_detector/image/compressedDepth [sensor_msgs/CompressedImage]
- /upper_body_detector/image/compressedDepth/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/image/compressedDepth/parameter_updates [dynamic_reconfigure/Config]
- /upper_body_detector/image/theora [theora_image_transport/Packet]
- /upper_body_detector/image/theora/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/image/theora/parameter_updates [dynamic_reconfigure/Config]
- /upper_body_detector/marker_array [visualization_msgs/MarkerArray]
- /upper_body_detector/roi [sensor_msgs/Image]
- /upper_body_detector/roi/compressed [sensor_msgs/CompressedImage]
- /upper_body_detector/roi/compressed/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/roi/compressed/parameter_updates [dynamic_reconfigure/Config]
- /upper_body_detector/roi/compressedDepth [sensor_msgs/CompressedImage]
- /upper_body_detector/roi/compressedDepth/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/roi/compressedDepth/parameter_updates [dynamic_reconfigure/Config]
- /upper_body_detector/roi/theora [theora_image_transport/Packet]
- /upper_body_detector/roi/theora/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
- /upper_body_detector/roi/theora/parameter_updates [dynamic_reconfigure/Config]
Subscriptions:
- /camera/color/image_raw [sensor_msgs/Image]
- /camera/depth/camera_info [sensor_msgs/CameraInfo]
- /camera/depth/image_raw [sensor_msgs/Image]
- /clock [rosgraph_msgs/Clock]
- /ground_plane [ground_plane_estimation/GroundPlane]
Services:
- /upper_body_detector/get_loggers
- /upper_body_detector/image/compressed/set_parameters
- /upper_body_detector/image/compressedDepth/set_parameters
- /upper_body_detector/image/theora/set_parameters
- /upper_body_detector/roi/compressed/set_parameters
- /upper_body_detector/roi/compressedDepth/set_parameters
- /upper_body_detector/roi/theora/set_parameters
- /upper_body_detector/set_logger_level
contacting node
Pid: 20272
Connections:
- topic: /rosout
- to: /rosout
- direction: outbound
- transport: TCPROS
- topic: /upper_body_detector/image
- to: /rviz
- direction: outbound
- transport: TCPROS
- topic: /clock
- to: /gazebo
- direction: inbound
- transport: TCPROS
- topic: /camera/depth/camera_info
- to: /gazebo
- direction: inbound
- transport: TCPROS
- topic: /ground_plane
- to: /ground_plane
- direction: inbound
- transport: TCPROS
- topic: /camera/color/image_raw
- to: /gazebo
- direction: inbound
- transport: TCPROS
- topic: /camera/depth/image_raw
- to: /gazebo
- direction: inbound
- transport: TCPROS
Maybe it is something about units or a bad configuration of the camera topics?
I solved, was a problem with the camera. It wasnt publishing data properly. I changed the plugin and now its working