Hi,
I am currently working on Kalman Filters course and on the section 4.11 Configuring the robot_localization package.
Summary / TLDR:
Running roslaunch ukf_filtering ukf_filtering.launch produces this error:
[FATAL] [1678106298.789320387, 2411.050000000]: Could not read sensor update configuration for topic odom0 (type: 7, expected: 7). Error was type error
The error is confusing as expected type and provided type are the same.
==========
After configuring, building and running ukf_filtering package as stated in the course notes, I get the following error.
Webshell 1 Output (NO ERROR HERE):
user:~$ roslaunch ekf_ukf auxiliary_nodes.launch
... logging to /home/user/.ros/log/1b54c978-bc16-11ed-83d8-0242c0a8e007/roslaunch-4_xterm-8514.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://4_xterm:40635/
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
noisy_odom_node (ekf_ukf/noisy_odom_republisher.py)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
spawn_urdf (gazebo_ros/spawn_model)
ROS_MASTER_URI=http://4_simulation:11311
process[spawn_urdf-1]: started with pid [8524]
process[robot_state_publisher-2]: started with pid [8525]
process[noisy_odom_node-3]: started with pid [8528]
[INFO] [1678106283.200705, 2395.606000]: Started noisy odometry publisher node
[spawn_urdf-1] process has finished cleanly
log file: /home/user/.ros/log/1b54c978-bc16-11ed-83d8-0242c0a8e007/spawn_urdf-1*.log
Webshell 2 Output (ERROR HERE):
user:~/catkin_ws$ roslaunch ukf_filtering ukf_filtering.launch
... logging to /home/user/.ros/log/1b54c978-bc16-11ed-83d8-0242c0a8e007/roslaunch-4_xterm-8599.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://4_xterm:35335/
SUMMARY
========
CLEAR PARAMETERS
* /ukf_localization_node/
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
* /ukf_localization_node/base_link_frame: base_link
* /ukf_localization_node/frequency: 50
* /ukf_localization_node/imu0: /mobile_base/sens...
* /ukf_localization_node/imu0_config: [False, False, Fa...
* /ukf_localization_node/imu0_differential: False
* /ukf_localization_node/initial_estimate_covariance: ['1e-9', 0, 0, 0,...
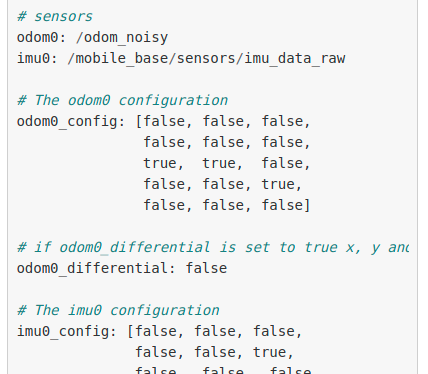
* /ukf_localization_node/odom0: /odom_noisy
* /ukf_localization_node/odom0_config: [False, False, 'f...
* /ukf_localization_node/odom0_differential: False
* /ukf_localization_node/odom_frame: odom
* /ukf_localization_node/process_noise_covariance: [0.05, 0, 0, 0, 0...
* /ukf_localization_node/publish_tf: False
* /ukf_localization_node/two_d_mode: True
* /ukf_localization_node/world_frame: odom
NODES
/
ukf_localization_node (robot_localization/ukf_localization_node)
ROS_MASTER_URI=http://4_simulation:11311
process[ukf_localization_node-1]: started with pid [8608]
[FATAL] [1678106298.789320387, 2411.050000000]: Could not read sensor update configuration for topic odom0 (type: 7, expected: 7). Error was type error
The error seems confusing to me as it says “type: 7 and expected: 7” and that there is a “type error”. If the expected type and provided type are the same (7 here), why do I get this error?
Thanks,
Girish