Hello!
The kinematic diagram and frame assignment is not clear told in Unit 3(Forward Kinematics), Can someone pls help.
Thanks
Hi,
What exactly dont you understand?
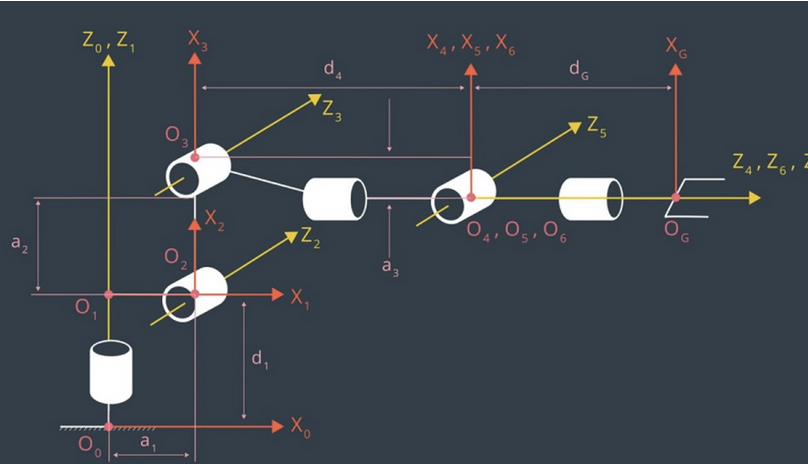
What you see here is that every Z axis is placed where the rotation or translation of the joint is. In this case its only rotations, so all of the Z axis are placed there.
As for the X axis its there because of the DH method to transform basically the Zi-1 to the Zi… The DH method.
Ok its clear now.Thank you