Hello,
I am trying to complete the ROS Navigation project. However I am facing issues with the summit_xl robot. When I try to create amcl with specific parameters for the summit_xl, it doesn’t show up correctly.
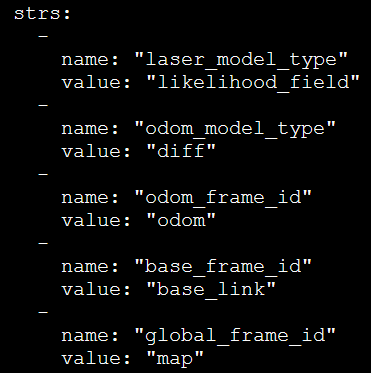
These are my parameters to configure the amcl

However after launching the amcl node, if I check the amcl_descriptions this is what shows up
Unfortunately due to this I am getting a frame “map” not found error.
Please help me resolve this. Thanks in advance.