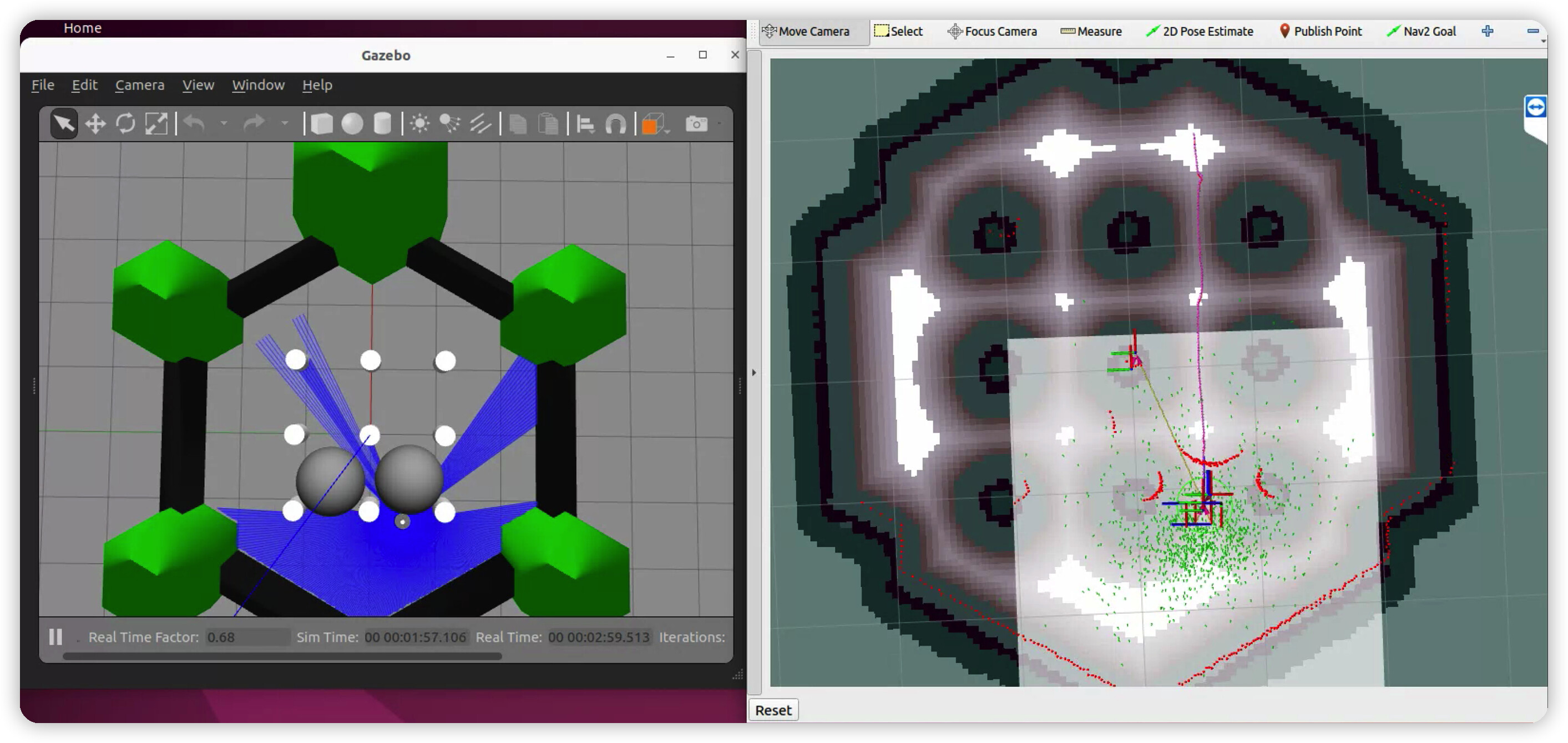
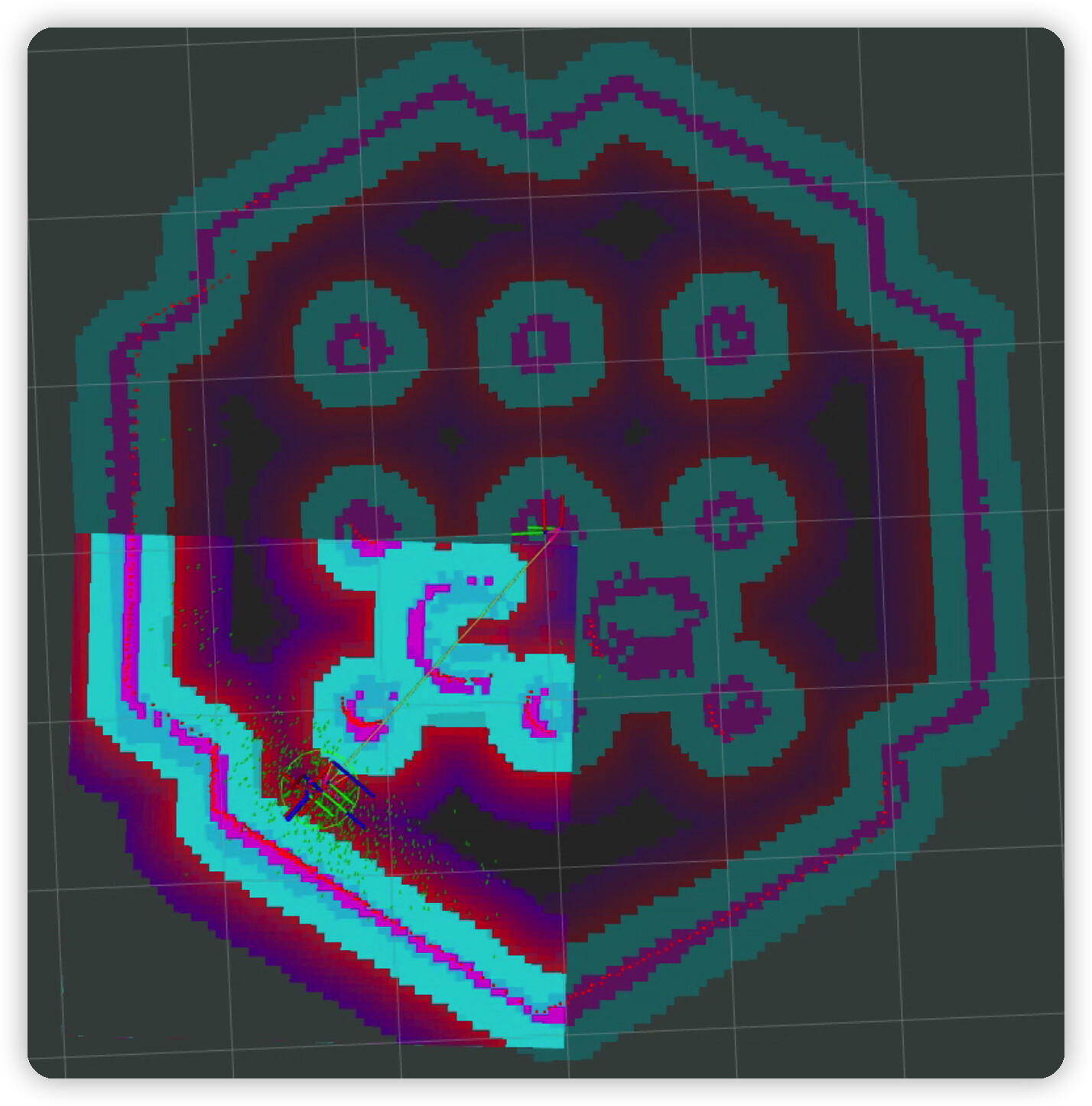
If I give a goal for the robot, it will bump into the obstacle.
I am using Humble and NAV2.
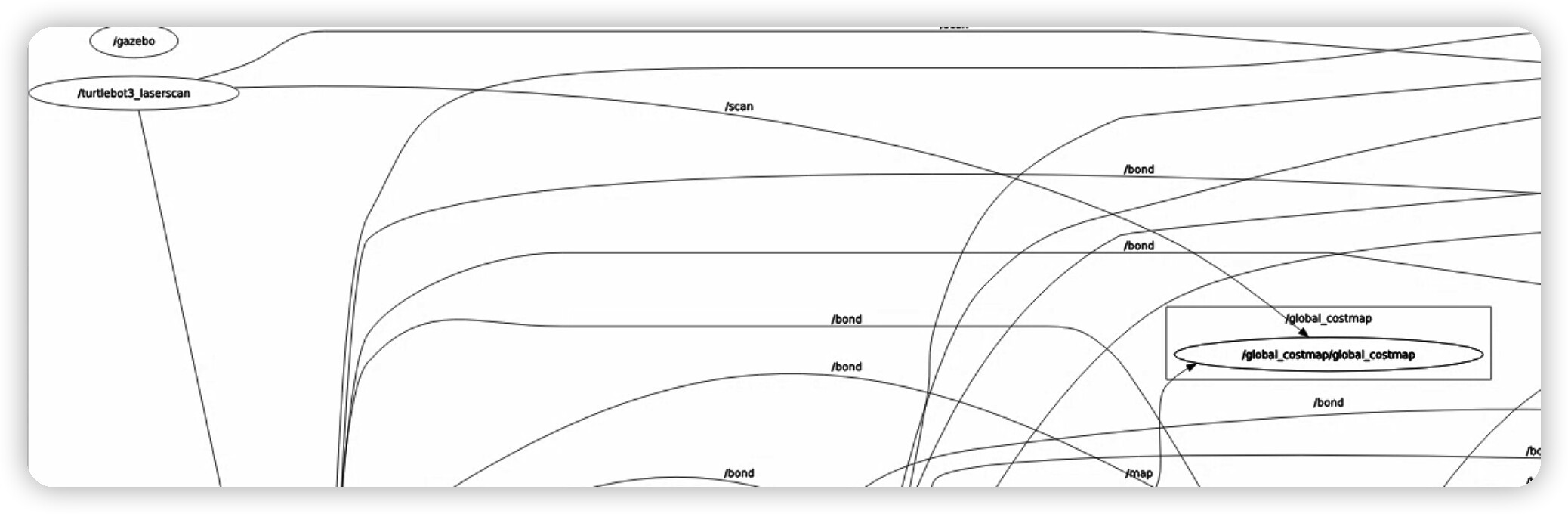
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 2.0
publish_frequency: 2.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.1
resolution: 0.05
track_unknown_space: true
plugins: [“static_layer”, “obstacle_layer”, “inflation_layer”]
static_layer:
enabled: True
plugin: “nav2_costmap_2d::StaticLayer”
map_subscribe_transient_local: True
obstacle_layer:
plugin: “nav2_costmap_2d::ObstacleLayer”
enabled: True
observation_sources: scan
scan:
topic: /scan
sensor_frame: “base_scan”
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: “LaserScan”
# observation_persistence: 0.3
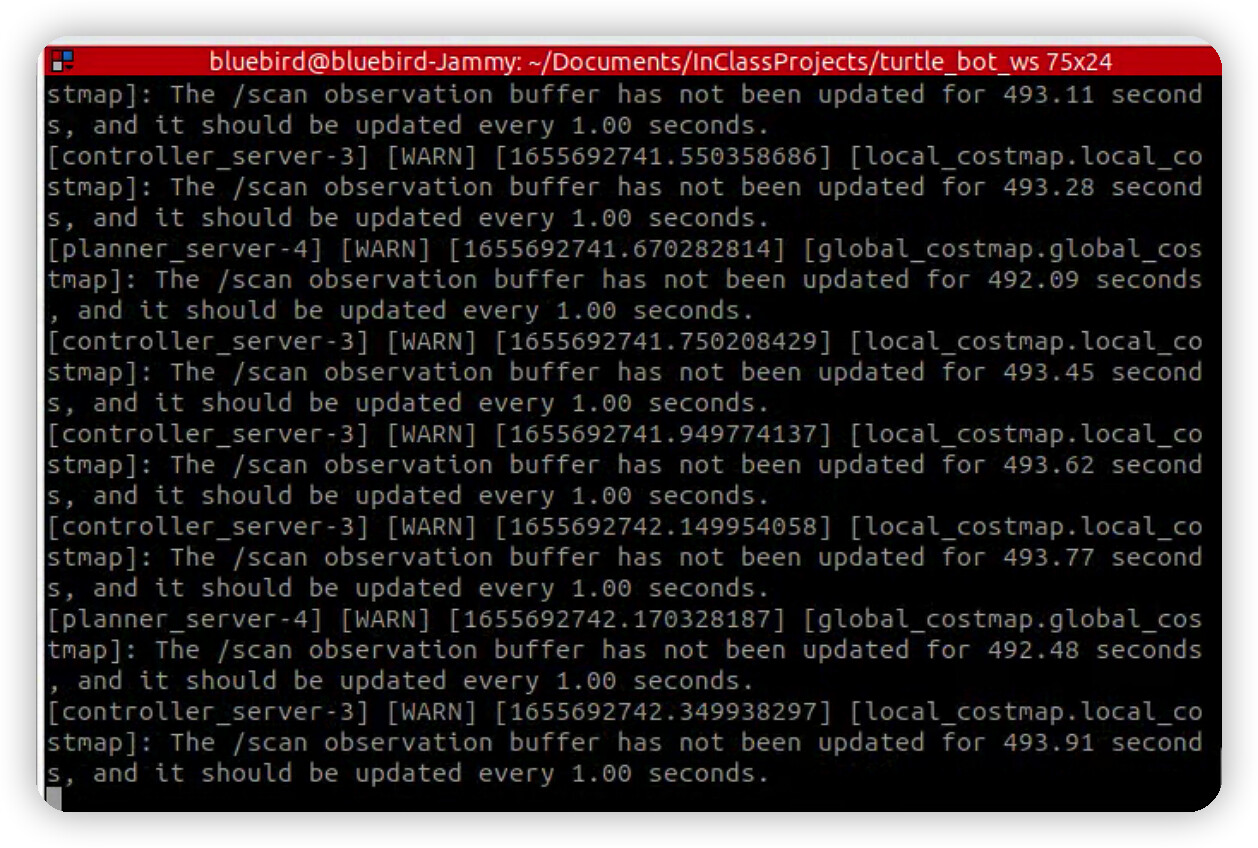
expected_update_rate: 1.0
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
inflation_layer:
plugin: “nav2_costmap_2d::InflationLayer”
cost_scaling_factor: 1.0
inflation_radius: 0.55
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 5.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.1
always_send_full_costmap: True
plugins: [“obstacle_layer”, “inflation_layer”]
obstacle_layer:
plugin: “nav2_costmap_2d::ObstacleLayer”
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: “LaserScan”
# observation_persistence: 0.3
expected_update_rate: 1.0
inflation_layer:
plugin: “nav2_costmap_2d::InflationLayer”
cost_scaling_factor: 3.0
inflation_radius: 1.0
always_send_full_costmap: True
# voxel_layer:
# plugin: “nav2_costmap_2d::VoxelLayer”
# enabled: True
# publish_voxel_map: True
# origin_z: 0.0
# z_resolution: 0.05
# z_voxels: 16
# max_obstacle_height: 2.0
# mark_threshold: 0
# observation_sources: scan
# scan:
# topic: /scan
# max_obstacle_height: 2.0
# clearing: True
# marking: True
# data_type: “LaserScan”
# raytrace_max_range: 3.0
# raytrace_min_range: 0.0
# obstacle_max_range: 2.5
# obstacle_min_range: 0.0
# static_layer:
# map_subscribe_transient_local: Truelocal_costmap_client:
ros__parameters:
use_sim_time: True
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True