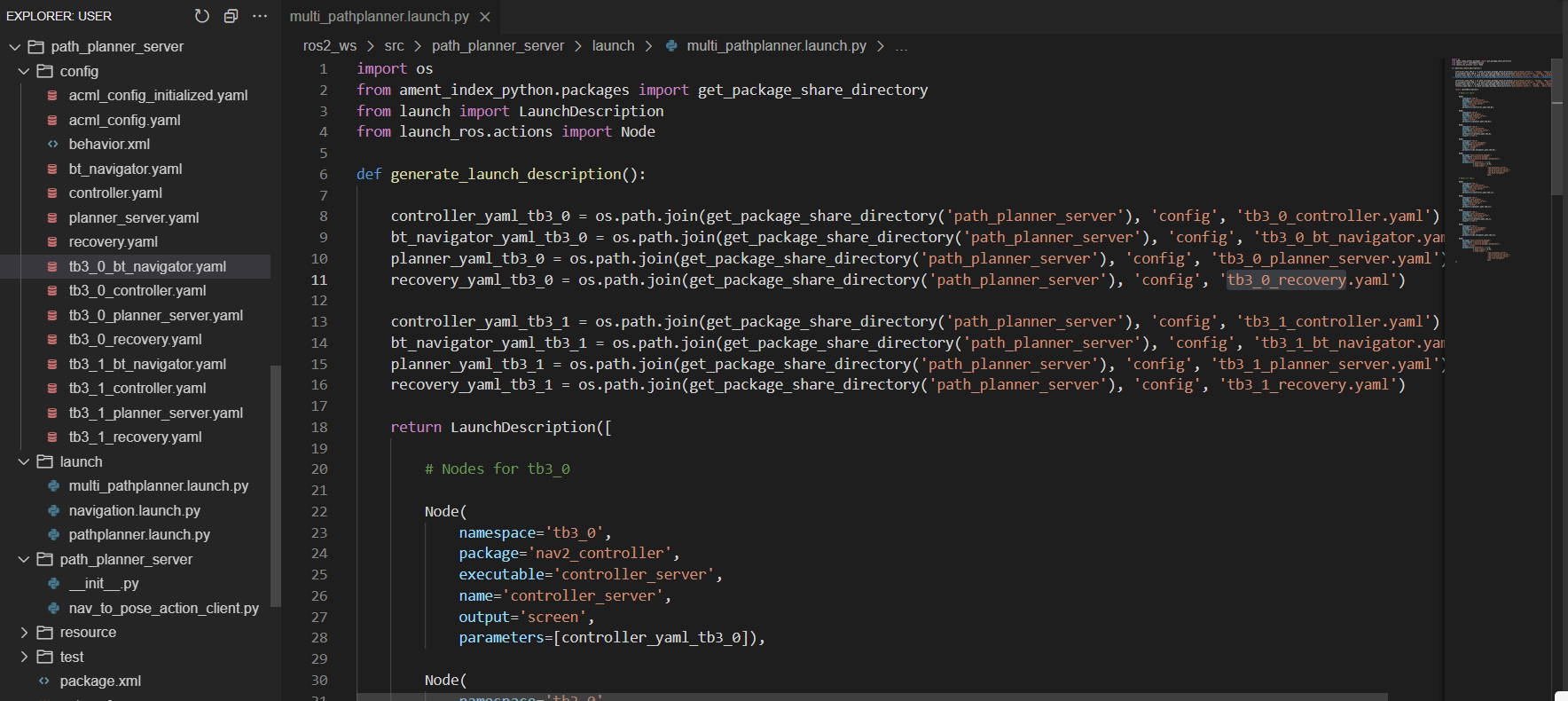
Hello. After running ros2 launch path_planner_server multi_pathplanner.launch.py
I have the following output
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2022-11-11-19-51-36-823808-2_xterm-24463
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [controller_server-1]: process started with pid [24474]
[INFO] [planner_server-2]: process started with pid [24476]
[INFO] [recoveries_server-3]: process started with pid [24478]
[INFO] [bt_navigator-4]: process started with pid [24480]
[INFO] [lifecycle_manager-5]: process started with pid [24482]
[INFO] [controller_server-6]: process started with pid [24484]
[INFO] [planner_server-7]: process started with pid [24512]
[INFO] [recoveries_server-8]: process started with pid [24516]
[INFO] [bt_navigator-9]: process started with pid [24520]
[INFO] [lifecycle_manager-10]: process started with pid [24523]
[controller_server-1] [ERROR] [1668196297.448985751] [rcl]: Failed to parse global arguments
[controller_server-1] terminate called after throwing an instance of 'rclcpp::exceptions::RCLInvalidROSArgsError'
[controller_server-1] what(): failed to initialize rcl: Couldn't parse params file: '--params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_0_controller.yaml'. Error: Error parsing a event near line 11, at /tmp/binarydeb/ros-galactic-rcl-yaml-param-parser-3.1.2/src/parse.c:769, at /tmp/binarydeb/ros-galactic-rcl-3.1.2/src/rcl/arguments.c:406
[planner_server-2] [ERROR] [1668196297.447438654] [rcl]: Failed to parse global arguments
[planner_server-2] terminate called after throwing an instance of 'rclcpp::exceptions::RCLInvalidROSArgsError'
[planner_server-2] what(): failed to initialize rcl: Couldn't parse params file: '--params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_0_planner_server.yaml'. Error: No value at line 25, at /tmp/binarydeb/ros-galactic-rcl-yaml-param-parser-3.1.2/src/parse.c:245, at /tmp/binarydeb/ros-galactic-rcl-3.1.2/src/rcl/arguments.c:406
[recoveries_server-3] [INFO] [1668196297.506862840] [tb3_0.recoveries_server]:
[recoveries_server-3] recoveries_server lifecycle node launched.
[recoveries_server-3] Waiting on external lifecycle transitions to activate
[recoveries_server-3] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-4] [INFO] [1668196297.492525329] [tb3_0.bt_navigator]:
[bt_navigator-4] bt_navigator lifecycle node launched.
[bt_navigator-4] Waiting on external lifecycle transitions to activate
[bt_navigator-4] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-4] [INFO] [1668196297.492671077] [tb3_0.bt_navigator]: Creating
[lifecycle_manager-5] [INFO] [1668196297.456611110] [tb3_0_lifecycle_manager_pathplanner]: Creating
[lifecycle_manager-5] [INFO] [1668196297.462123322] [tb3_0_lifecycle_manager_pathplanner]: Creating and initializing lifecycle service clients
[lifecycle_manager-5] [INFO] [1668196297.480734247] [tb3_0_lifecycle_manager_pathplanner]: Starting managed nodes bringup...
[lifecycle_manager-5] [INFO] [1668196297.480801985] [tb3_0_lifecycle_manager_pathplanner]: Configuring tb3_0/planner_server
[controller_server-6] [ERROR] [1668196297.482311605] [rcl]: Failed to parse global arguments
[controller_server-6] terminate called after throwing an instance of 'rclcpp::exceptions::RCLInvalidROSArgsError'
[controller_server-6] what(): failed to initialize rcl: Couldn't parse params file: '--params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_1_controller.yaml'. Error: Error parsing a event near line 11, at /tmp/binarydeb/ros-galactic-rcl-yaml-param-parser-3.1.2/src/parse.c:769, at /tmp/binarydeb/ros-galactic-rcl-3.1.2/src/rcl/arguments.c:406
[planner_server-7] [ERROR] [1668196297.496074559] [rcl]: Failed to parse global arguments
[planner_server-7] terminate called after throwing an instance of 'rclcpp::exceptions::RCLInvalidROSArgsError'
[planner_server-7] what(): failed to initialize rcl: Couldn't parse params file: '--params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_1_planner_server.yaml'. Error: No value at line 25, at /tmp/binarydeb/ros-galactic-rcl-yaml-param-parser-3.1.2/src/parse.c:245, at /tmp/binarydeb/ros-galactic-rcl-3.1.2/src/rcl/arguments.c:406
[bt_navigator-9] [INFO] [1668196297.520062247] [tb3_1.bt_navigator]:
[bt_navigator-9] bt_navigator lifecycle node launched.
[bt_navigator-9] Waiting on external lifecycle transitions to activate
[bt_navigator-9] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-9] [INFO] [1668196297.520198734] [tb3_1.bt_navigator]: Creating
[recoveries_server-8] [INFO] [1668196297.551937259] [tb3_1.recoveries_server]:
[recoveries_server-8] recoveries_server lifecycle node launched.
[recoveries_server-8] Waiting on external lifecycle transitions to activate
[recoveries_server-8] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[ERROR] [planner_server-2]: process has died [pid 24476, exit code -6, cmd '/opt/ros/galactic/lib/nav2_planner/planner_server --ros-args -r __node:=planner_server -r __ns:=/tb3_0 --params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_0_planner_server.yaml'].
[ERROR] [controller_server-1]: process has died [pid 24474, exit code -6, cmd '/opt/ros/galactic/lib/nav2_controller/controller_server --ros-args -r __node:=controller_server -r __ns:=/tb3_0 --params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_0_controller.yaml'].
[lifecycle_manager-10] [INFO] [1668196297.640640127] [tb3_1_lifecycle_manager_pathplanner]: Creating
[ERROR] [controller_server-6]: process has died [pid 24484, exit code -6, cmd '/opt/ros/galactic/lib/nav2_controller/controller_server --ros-args -r __node:=controller_server -r __ns:=/tb3_1 --params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_1_controller.yaml'].
[ERROR] [planner_server-7]: process has died [pid 24512, exit code -6, cmd '/opt/ros/galactic/lib/nav2_planner/planner_server --ros-args -r __node:=planner_server -r __ns:=/tb3_1 --params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/tb3_1_planner_server.yaml'].
[lifecycle_manager-10] [INFO] [1668196297.683407908] [tb3_1_lifecycle_manager_pathplanner]: Creating and initializing lifecycle service clients
[lifecycle_manager-10] [INFO] [1668196297.691820239] [tb3_1_lifecycle_manager_pathplanner]: Starting managed nodes bringup...
[lifecycle_manager-10] [INFO] [1668196297.691869116] [tb3_1_lifecycle_manager_pathplanner]: Configuring tb3_1/planner_server
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[lifecycle_manager-10] [INFO] [1668196331.806986389] [rclcpp]: signal_handler(signal_value=2)
[bt_navigator-9] [INFO] [1668196331.806992543] [rclcpp]: signal_handler(signal_value=2)
[recoveries_server-8] [INFO] [1668196331.807007096] [rclcpp]: signal_handler(signal_value=2)
[lifecycle_manager-5] [INFO] [1668196331.807004372] [rclcpp]: signal_handler(signal_value=2)
[bt_navigator-4] [INFO] [1668196331.807010461] [rclcpp]: signal_handler(signal_value=2)
[recoveries_server-3] [INFO] [1668196331.807019247] [rclcpp]: signal_handler(signal_value=2)
[lifecycle_manager-5] terminate called after throwing an instance of 'std::runtime_error'
[lifecycle_manager-5] what(): tb3_0/planner_server/change_state service client: interrupted while waiting for service
[lifecycle_manager-10] terminate called after throwing an instance of 'std::runtime_error'
[lifecycle_manager-10] what(): tb3_1/planner_server/change_state service client: interrupted while waiting for service
[recoveries_server-3] [INFO] [1668196331.808368616] [tb3_0.recoveries_server]: Destroying
[recoveries_server-8] [INFO] [1668196331.808537661] [tb3_1.recoveries_server]: Destroying
[bt_navigator-9] [INFO] [1668196331.808806753] [tb3_1.bt_navigator]: Destroying
[bt_navigator-4] [INFO] [1668196331.811429027] [tb3_0.bt_navigator]: Destroying
[ERROR] [lifecycle_manager-5]: process has died [pid 24482, exit code -6, cmd '/opt/ros/galactic/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=tb3_0_lifecycle_manager_pathplanner --params-file /tmp/launch_params_mb6wgn_o --params-file /tmp/launch_params_dy2_ai90 --params-file /tmp/launch_params_oe2ff5zo'].
[ERROR] [lifecycle_manager-10]: process has died [pid 24523, exit code -6, cmd '/opt/ros/galactic/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=tb3_1_lifecycle_manager_pathplanner --params-file /tmp/launch_params_l_qqiohc --params-file /tmp/launch_params_9msoe3os --params-file /tmp/launch_params_g23aa2mr'].
[INFO] [bt_navigator-9]: process has finished cleanly [pid 24520]
[INFO] [recoveries_server-8]: process has finished cleanly [pid 24516]
[INFO] [bt_navigator-4]: process has finished cleanly [pid 24480]
[INFO] [recoveries_server-3]: process has finished cleanly [pid 24478]
Any idea?
Thank you