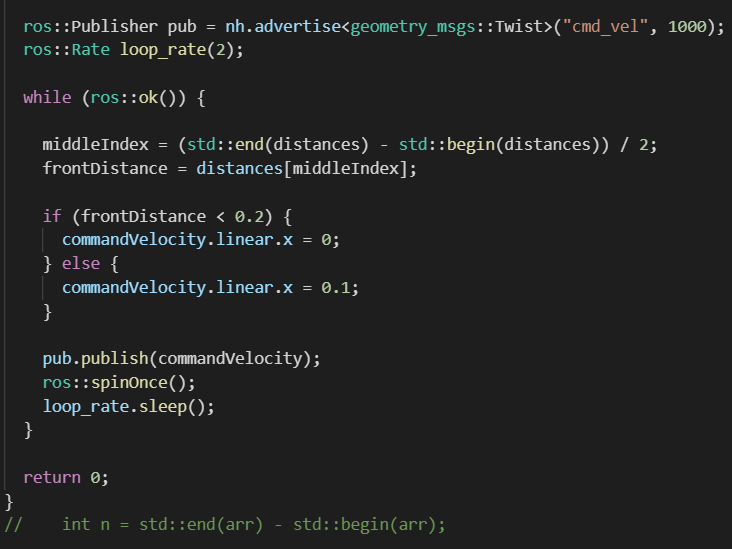
When I try to launch the turtlebot3_move _sub_pub.cpp I get this error :
[controller-1] process has died [pid 2796, exit code -11, cmd /home/user/catkin_ws/devel/lib/turtlebot3_move/turtlebot3_sub_pub __name:=controller __log:=/home/user/.ros/log/97c8319e-6c89-11ec-9cd3-0242c0a88007/controller-1.log].
log file: /home/user/.ros/log/97c8319e-6c89-11ec-9cd3-0242c0a88007/controller-1*.log
If I uses roscore + rosrun:
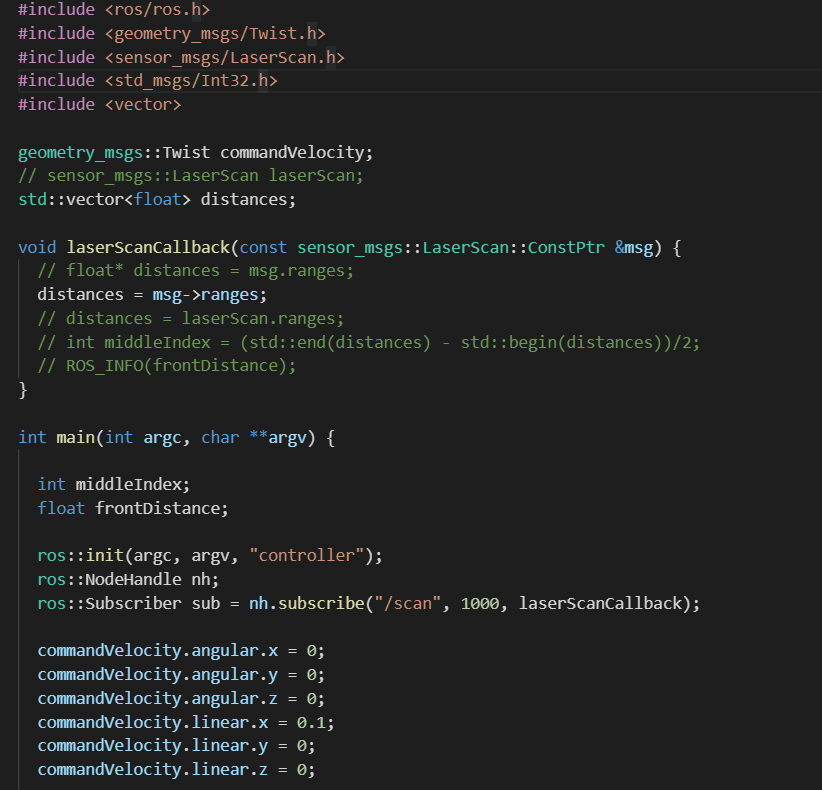
/home/user/catkin_ws/src/turtlebot3_move/src/turtlebot3_sub_pub.cpp: line 7: geometry_msgs::Twist: command not found
/home/user/catkin_ws/src/turtlebot3_move/src/turtlebot3_sub_pub.cpp: line 8: //: Is a directory
/home/user/catkin_ws/src/turtlebot3_move/src/turtlebot3_sub_pub.cpp: line 9: float: No such file or directory
/home/user/catkin_ws/src/turtlebot3_move/src/turtlebot3_sub_pub.cpp: line 11: syntax error near unexpected token `('
/home/user/catkin_ws/src/turtlebot3_move/src/turtlebot3_sub_pub.cpp: line 11: `void laserScanCallback(const sensor_msgs::LaserScan::ConstPtr &msg) {'