Hi The Construct team,
I recently reserved TurtleBot from Real Robot Lab to check how my program is working. When my program started to fail, I quickly realized that scan properties are different in Simulation than on the Real Robot.
I am doing ROS2 Basics in 5 Days in both Python and C++.
TLDR ; Summary :
-------------------------
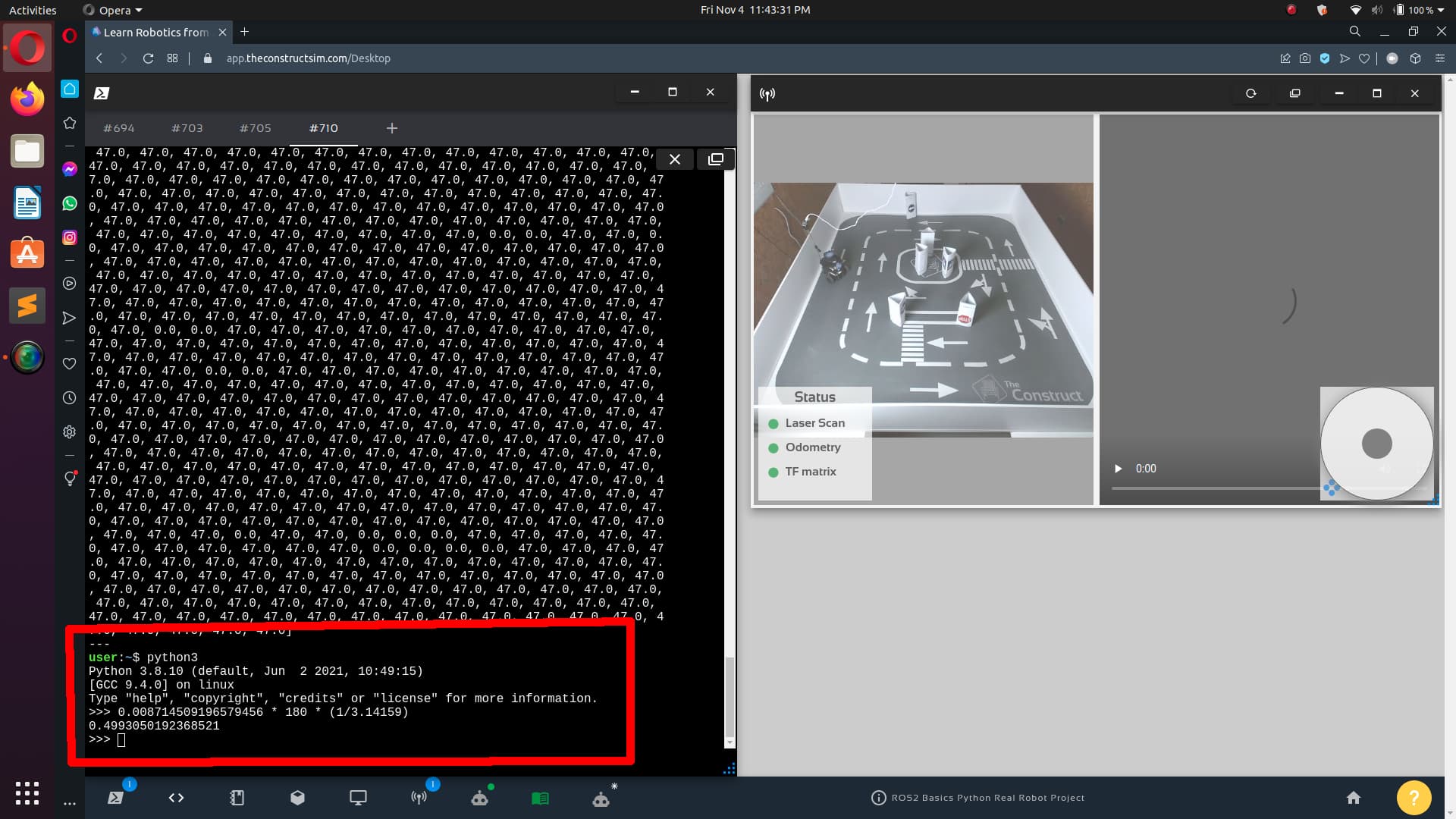
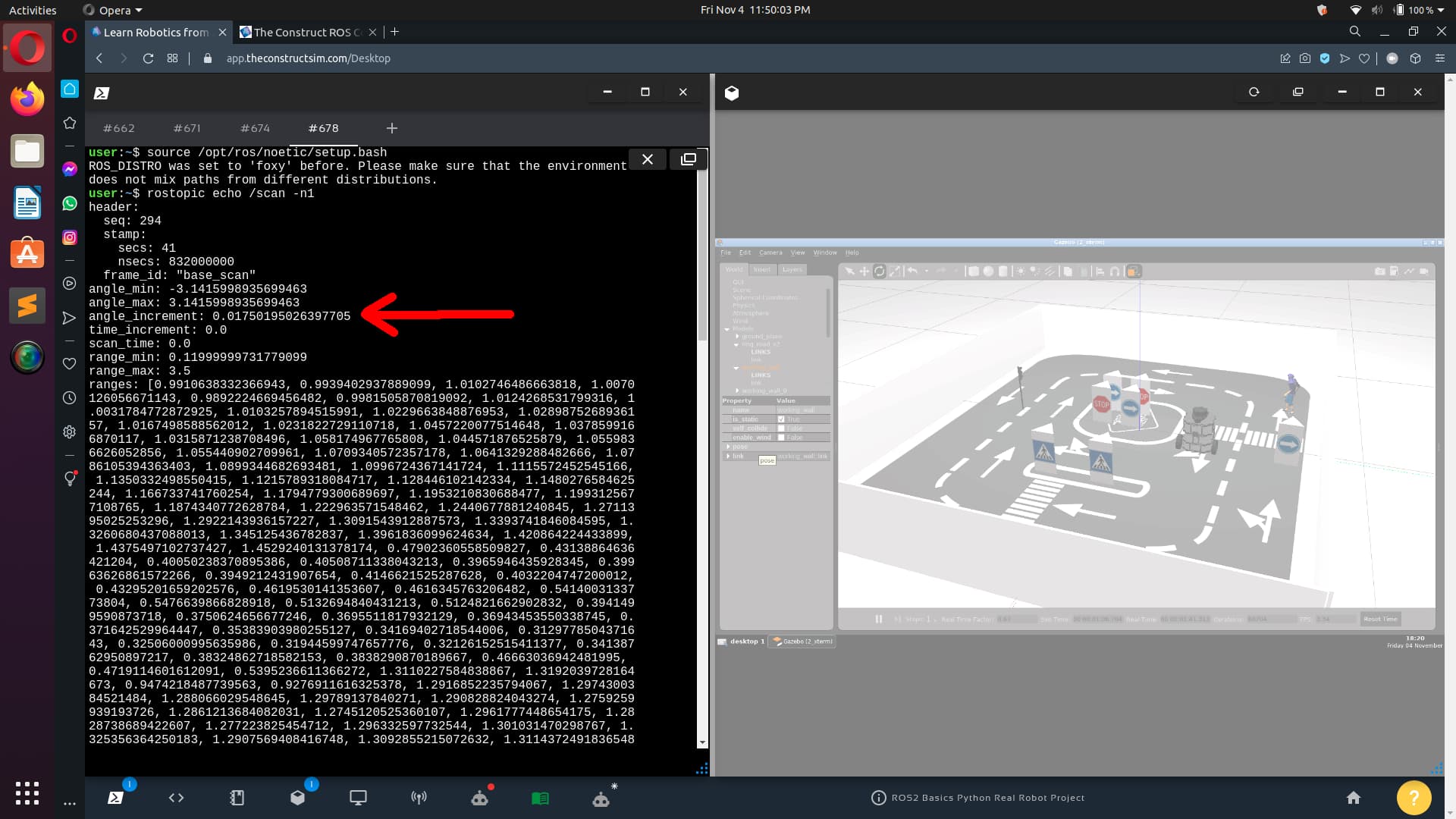
Minimum angle increment for /scan topic LaserScan Messages for Simulation in both Py and C++ is 0.0175… rads = ~1 deg(s). However, on the Real Robot, the /scan topic echo provides minimum angle increment as 0.00871… rads = 0.5 deg(s).
The problem here is that in Real Robot, 360 would be the front ray, but for simulation 180 would be the front ray. So everything multiplies by 2 for real robot.
Also, Real Robot provides 720 readings and Simulation provides 360 readings.
-------------------------
End of Summary
Since downgrading the Lidar on the Real Robot will be an unreasonable choice, I would request someone to fix the Simulation Laser Scanner Gazebo Sensor Plugin to provide 720 values with angle increment of 0.5 degs from -3.14 to 3.14 rads. That way, Simulation can be same as Real Robot.
Although I can account for this change in my program, some other student would not want to waste time trying to find out what went wrong while using the Real Robot booking session (like how I did and wasted 15 mins not being able to do anything). I request someone to fix this soon.
Attached Images for reference:
-------------------------
Real Robot :
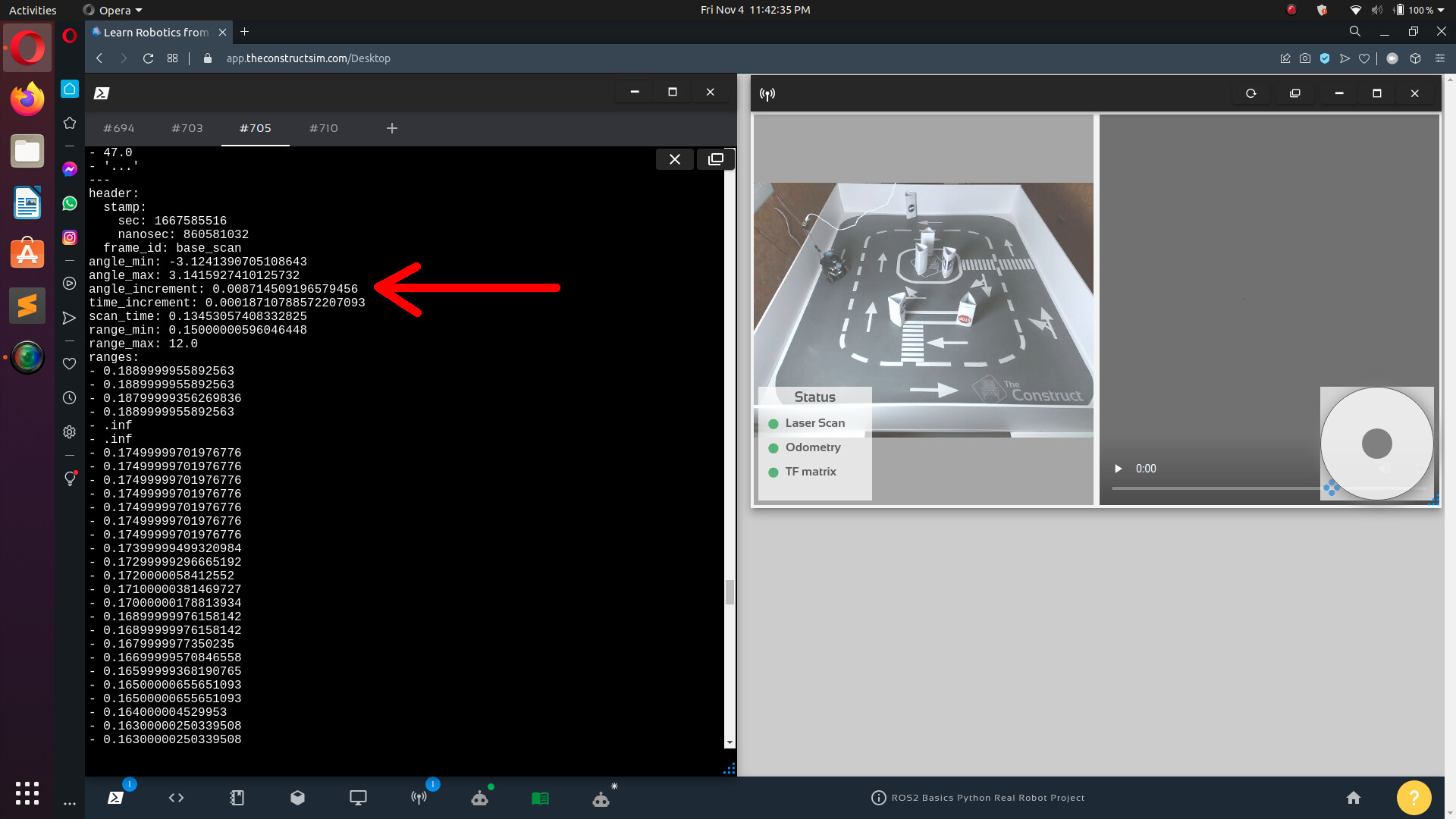
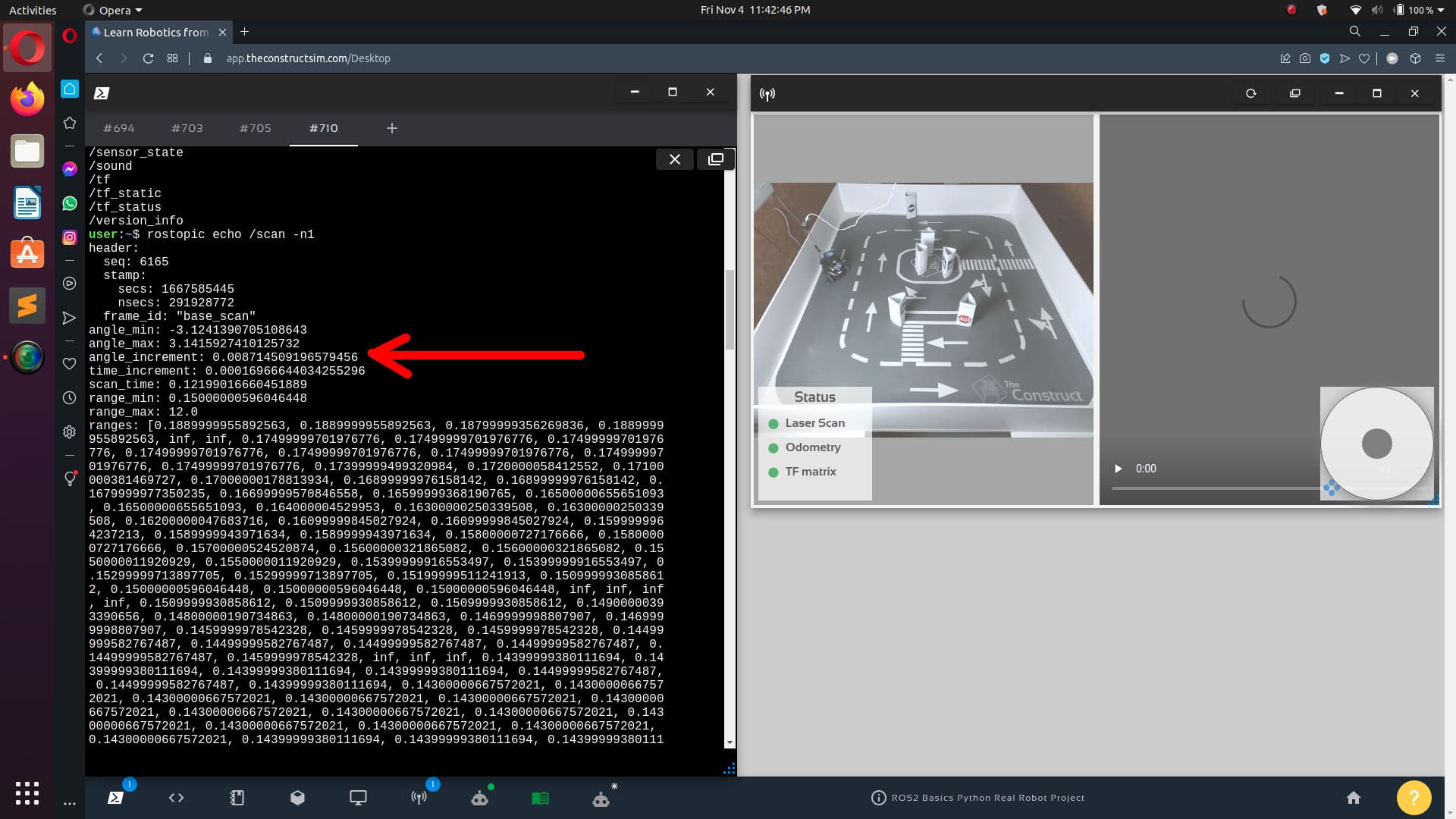
-------------------------
Simulation :
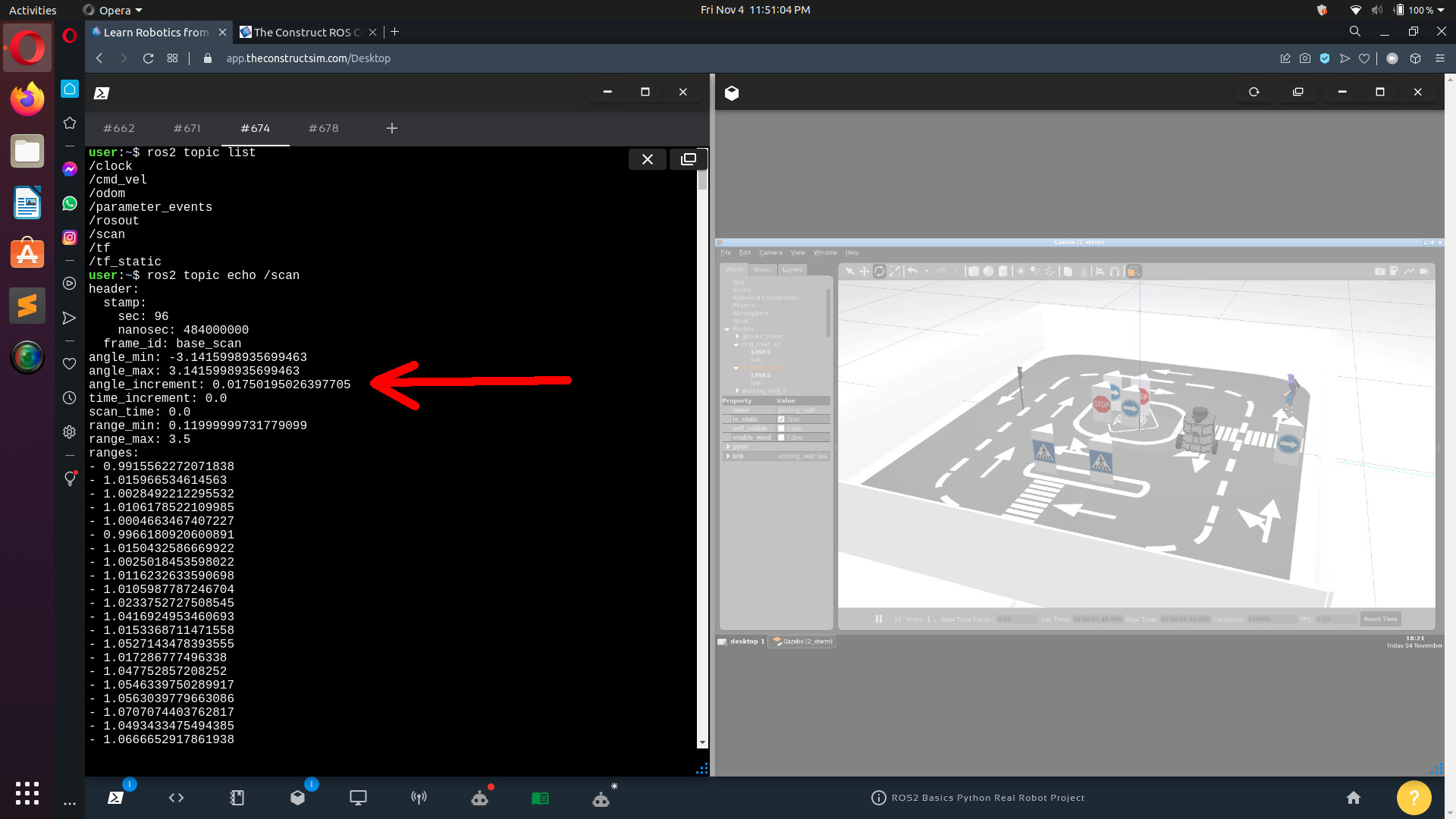

-------------------------
Thanks.
Girish