I am getting the following error message at the end of unit3. Copy pasted all the code from the notebook and still not running properly. Can I get some help?
Hello @roman.smid
I can see that under section 3.14 it sais
Create a new file called
dynamixel_hardware.xmlat the root directory of the package where the CMakeLists.txt file is also defined.
but it should say:
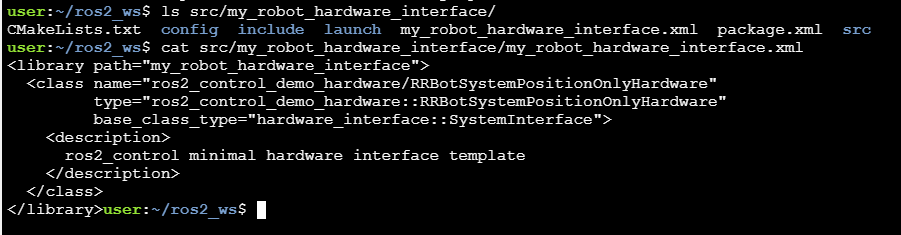
Create a new file called
my_robot_hardware_interface.xmlat the root directory of the package where the CMakeLists.txt file is also defined.
Please rename your file
dynamixel_hardware.xml
to
my_robot_hardware_interface.xml
and try again.
Thanks for such a quick reply @rzegers, however I was using my_robot_hardware_interface.xml in the root dir and CMake.txt already and am still getting the error.
Hello @roman.smid, thanks for reporting back.
Could please verify if the on_configure() method is defined inside the my_robot_hardware_interface.cpp file ?
This is what that method should look like:
CallbackReturn RRBotSystemPositionOnlyHardware::on_configure(
const rclcpp_lifecycle::State &previous_state) {
// START: This part here is for exemplary purposes - Please do not copy to
// your production code
// prevent unused variable warning
auto prev_state = previous_state;
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Configuring ...please wait...");
for (int i = 0; i < hw_start_sec_; i++) {
rclcpp::sleep_for(std::chrono::seconds(1));
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"%.1f seconds left...", hw_start_sec_ - i);
}
// END: This part here is for exemplary purposes - Please do not copy to your
// production code
// reset values always when configuring hardware
for (uint i = 0; i < hw_states_.size(); i++) {
hw_states_[i] = 0;
hw_commands_[i] = 0;
}
RCLCPP_INFO(rclcpp::get_logger("RRBotSystemPositionOnlyHardware"),
"Successfully configured!");
return CallbackReturn::SUCCESS;
}
I have also updated the course to include instructions about adding the method under this section:
3.7 Add the on_configure() method
I would love to hear back . Thanks!
Roberto
1 Like
Amazing work @rzegers , added the on_configure() method to the .cpp file and it works.
Thanks so much for helping out so quickly.
2 Likes