I’ve done the first part in the project without problems, I was able to plan and execute the home position. However when I added the perception to the package as the second part requires, the execute command never became available !
It’s like moveit still in planning for some reason
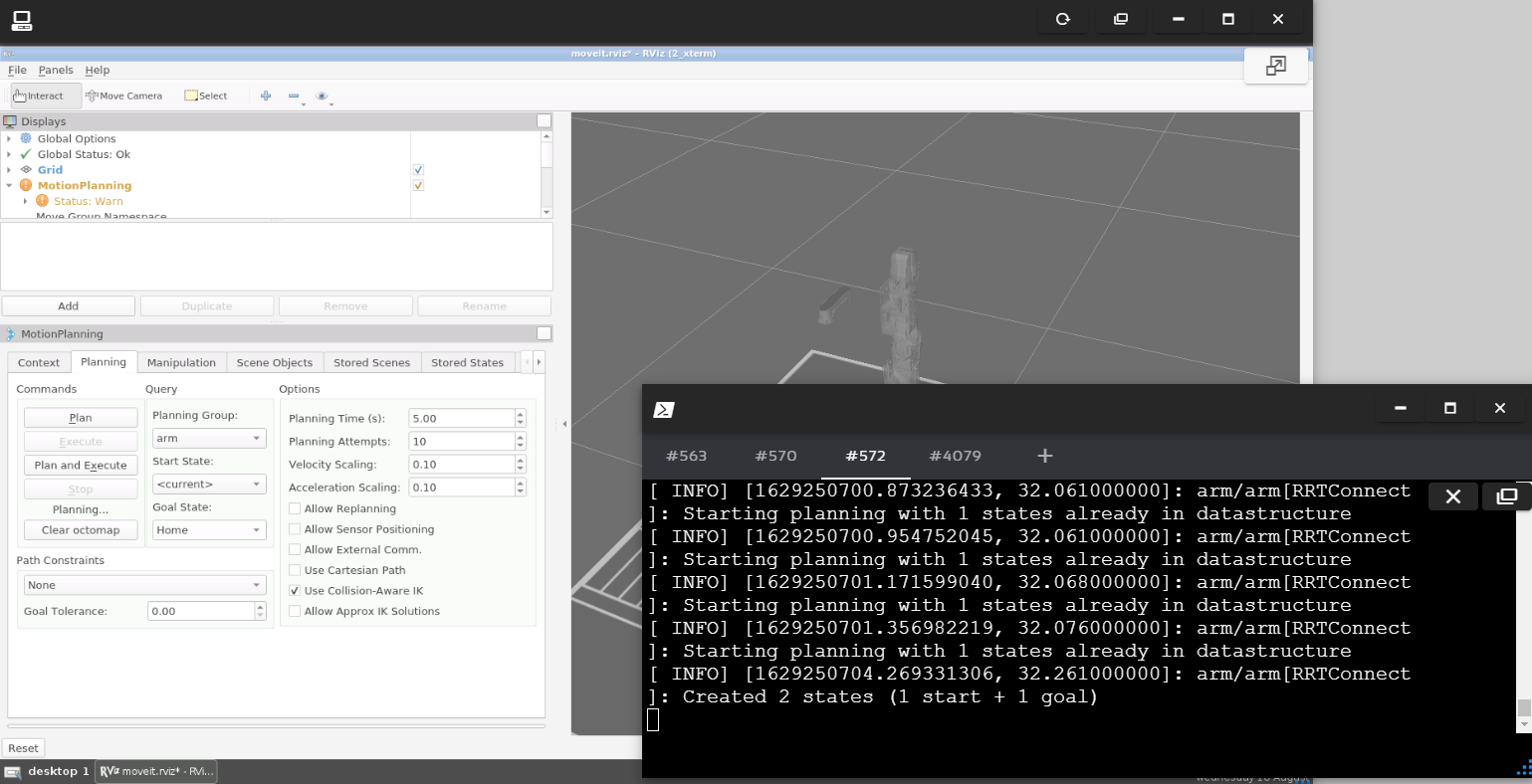
even when I tried to use plan and execute, the result stills the same.
there were nothing in the course about some kind of modification on the planning after adding the perception.
Can anyone explain to me what is going on ?