Hey, I’m unable to launch the ROSject simulation on running:
roslaunch realrobotlab main.launch
I’m sure this command worked a week or so back. I’m pretty sure I didn’t change anything on my end.
My ROS_PACKAGE_PATH also seems to be properly set:
echo $ROS_PACKAGE_PATH /home/user/catkin_ws/src:/home/user/simulation_ws/src:/home/simulations/public_sim_ws/src:/opt/ros/noetic/share
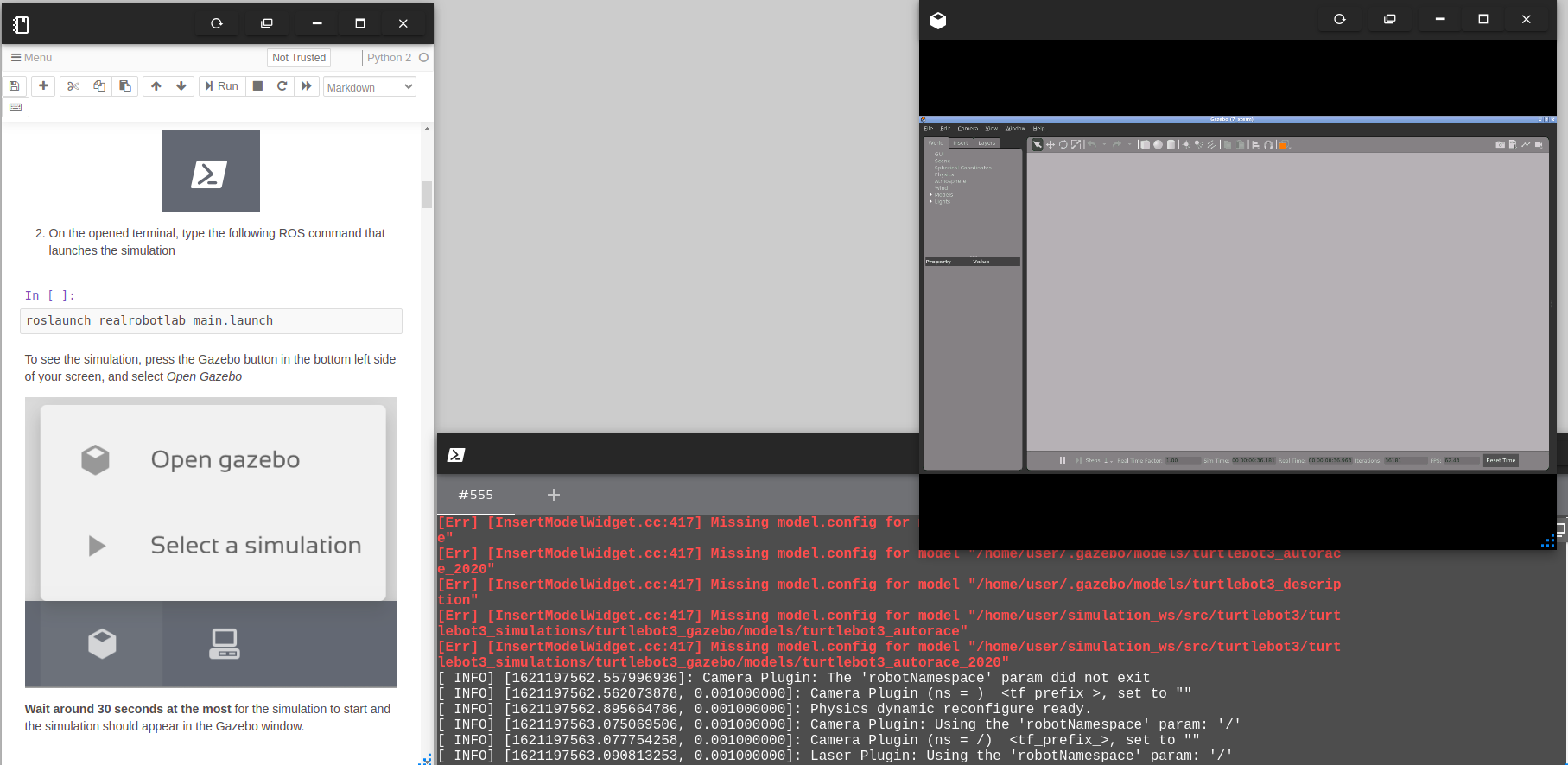
Error:
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/RubberDucky"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/lms1xx"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/media"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/meshes"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_autorace"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_autorace_2020"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_description"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace_2020"
[ INFO] [1619354427.680170526]: Camera Plugin: The 'robotNamespace' param did not exit
[ INFO] [1619354427.686343313, 0.001000000]: Camera Plugin (ns = ) <tf_prefix_>, set to ""
[ INFO] [1619354428.349798721, 0.001000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1619354428.357396056, 0.001000000]: Camera Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1619354428.370101207, 0.001000000]: Laser Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1619354428.371870644, 0.001000000]: Starting Laser Plugin (ns = /)
[ INFO] [1619354428.374598306, 0.001000000]: Laser Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1619354428.443613122, 0.001000000]: Starting plugin DiffDrive(ns = //)
[ INFO] [1619354428.443789251, 0.001000000]: DiffDrive(ns = //): <rosDebugLevel> = na
[ INFO] [1619354428.444880778, 0.001000000]: DiffDrive(ns = //): <tf_prefix> =
[ INFO] [1619354428.445984514, 0.001000000]: DiffDrive(ns = //): Advertise joint_states
[ INFO] [1619354428.447024962, 0.001000000]: DiffDrive(ns = //): Try to subscribe to cmd_vel
[ INFO] [1619354428.449670530, 0.001000000]: DiffDrive(ns = //): Subscribe to cmd_vel
[ INFO] [1619354428.450300759, 0.001000000]: DiffDrive(ns = //): Advertise odom on odom
[spawn_urdf-4] process has finished cleanly
log file: /home/user/.ros/log/6764cf90-a5c3-11eb-a8e4-0242ac1c0002/spawn_urdf-4*.log
[Wrn] [Publisher.cc:136] Queue limit reached for topic /gazebo/default/pose/local/info, deleting message. This warning is printed only once.
If I cd to ~/.gazebo I can see the relevant folders roslaunch is complaining about and indeed the model.config is missing. Why would they vanish? Should I just create dummy ones based on one that exists for example ~/.gazebo/quadrotor/model.config?
Hi,
That missing model config has no effect on the simulation. Its just saying that some models on the .gazebo folder dont ave that config file ( sometimes because they are packages instead of modl folders ).
Are you experimenting some issue in the simulation?
Yes, the simulation fails to launch @duckfrost
The terminal logs for me:
user:~$ roslaunch realrobotlab main.launch
... logging to /home/user/.ros/log/3014b2b2-af2d-11eb-a2e6-0242c0a86007/roslaunch-2_xterm-2109.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://2_xterm:45713/
SUMMARY
========
PARAMETERS
* /gazebo/enable_ros_network: True
* /robot_description: <?xml version="1....
* /robot_state_publisher_turtlebot3/publish_frequency: 5.0
* /rosdistro: noetic
* /rosversion: 1.15.9
* /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
robot_state_publisher_turtlebot3 (robot_state_publisher/robot_state_publisher)
spawn_urdf (gazebo_ros/spawn_model)
auto-starting new master
process[master]: started with pid [2119]
ROS_MASTER_URI=http://2_xterm:11311
setting /run_id to 3014b2b2-af2d-11eb-a2e6-0242c0a86007
process[rosout-1]: started with pid [2129]
started core service [/rosout]
process[gazebo-2]: started with pid [2136]
process[gazebo_gui-3]: started with pid [2139]
process[spawn_urdf-4]: started with pid [2144]
process[robot_state_publisher_turtlebot3-5]: started with pid [2145]
+++ ls /usr/bin/gzclient-11.1.0
++ gzclient_path=/usr/bin/gzclient-11.1.0
++ DISPLAY=:2
++ /usr/bin/gzclient-11.1.0 --verbose -g /opt/ros/noetic/lib/libgazebo_ros_paths_plugin.so -g /opt/ros/noetic/lib/libgazebo_ros_api_plugin.so __name:=gazebo_gui __log:=/home/user/.ros/log/3014b2b2-af2d-11eb-a2e6-0242c0a86007/gazebo_gui-3.log
Gazebo multi-robot simulator, version 11.1.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
Gazebo multi-robot simulator, version 11.1.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
[Wrn] [GuiIface.cc:199] g/gui-plugin is really loading a SystemPlugin. To load a GUI plugin please use --gui-client-plugin
[ INFO] [1620389420.569162899]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1620389420.572288508]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.96.7
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: ring_road_v2. Please specifythe SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[ INFO] [1620389420.894498326]: Finished loading Gazebo ROS API Plugin.
[Msg] Waiting for master.
[ INFO] [1620389420.897826476]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.96.7
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config filewill be used
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config filewill be used
[Wrn] [GuiIface.cc:119] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config filewill be used
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_pedestrian.Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will beused
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_pedestrian.Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will beused
Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: OverLoard Camera. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[ INFO] [1620389421.487788540]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1620389421.525095004]: Physics dynamic reconfigure ready.
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/RubberDucky"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/lms1xx"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/media"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/meshes"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_autorace"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_autorace_2020"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_description"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace"
[Err] [InsertModelWidget.cc:417] Missing model.config for model "/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace_2020"
[ INFO] [1620389422.287830431]: Camera Plugin: The 'robotNamespace' param did not exit
[ INFO] [1620389422.294296210, 0.001000000]: Camera Plugin (ns = ) <tf_prefix_>, set to ""
[ INFO] [1620389422.957793089, 0.001000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1620389422.961517528, 0.001000000]: Camera Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1620389422.978066502, 0.001000000]: Laser Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1620389422.978310757, 0.001000000]: Starting Laser Plugin (ns = /)
[ INFO] [1620389422.991079277, 0.001000000]: Laser Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1620389423.047533832, 0.001000000]: Starting plugin DiffDrive(ns = //)
[ INFO] [1620389423.047995840, 0.001000000]: DiffDrive(ns = //): <rosDebugLevel> = na
[ INFO] [1620389423.048959681, 0.001000000]: DiffDrive(ns = //): <tf_prefix> =
[ INFO] [1620389423.050246528, 0.001000000]: DiffDrive(ns = //): Advertise joint_states
[ INFO] [1620389423.050991343, 0.001000000]: DiffDrive(ns = //): Try to subscribe to cmd_vel
[ INFO] [1620389423.054036400, 0.001000000]: DiffDrive(ns = //): Subscribe to cmd_vel
[ INFO] [1620389423.054713824, 0.001000000]: DiffDrive(ns = //): Advertise odom on odom
[spawn_urdf-4] process has finished cleanly
log file: /home/user/.ros/log/3014b2b2-af2d-11eb-a2e6-0242c0a86007/spawn_urdf-4*.log
[Wrn] [Publisher.cc:136] Queue limit reached for topic /gazebo/default/pose/local/info, deleting message. This warning is printed only once.
and the gazebo window shows Gazebo open but no sim running.
Hi,
I just removed my old version of the RoBoX Turtlebot ROsject, boked a session and launched again with the command
roslaunch realrobotlab main.launch
And it worked:
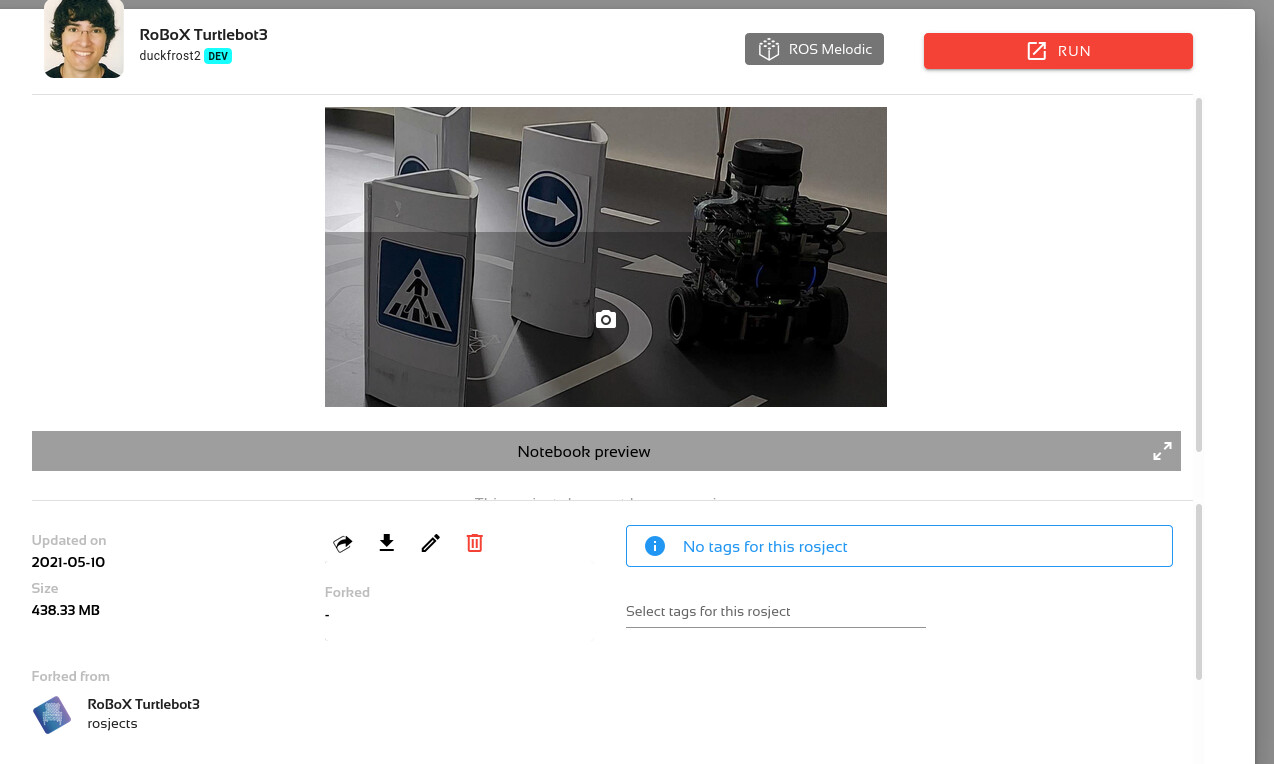
So I imagine that there is something wrong with your ROSjects. So I would reccomend to delete it, and do a new turtlebot reservatin ( this will copy a new version of the Rosject ) . To delete a Rosject you have to click on the image of the Rosject and then a full menu like this will appear:

Then just click on delete icon and follow the instructions.
Hope this helps and if its doesnt please share here your ROsject that doesnt work so that I can have a look at it and see what might be happening. Please make some screen captures of the issue apart form the terminal, just in case there is something wrong in the Gazebo window.
Hey, I tried deleting and then re-cloning the ROSject, still doesn’t work. I can’t share my ROSject, it complains “You can not share a fork whose parent is private”
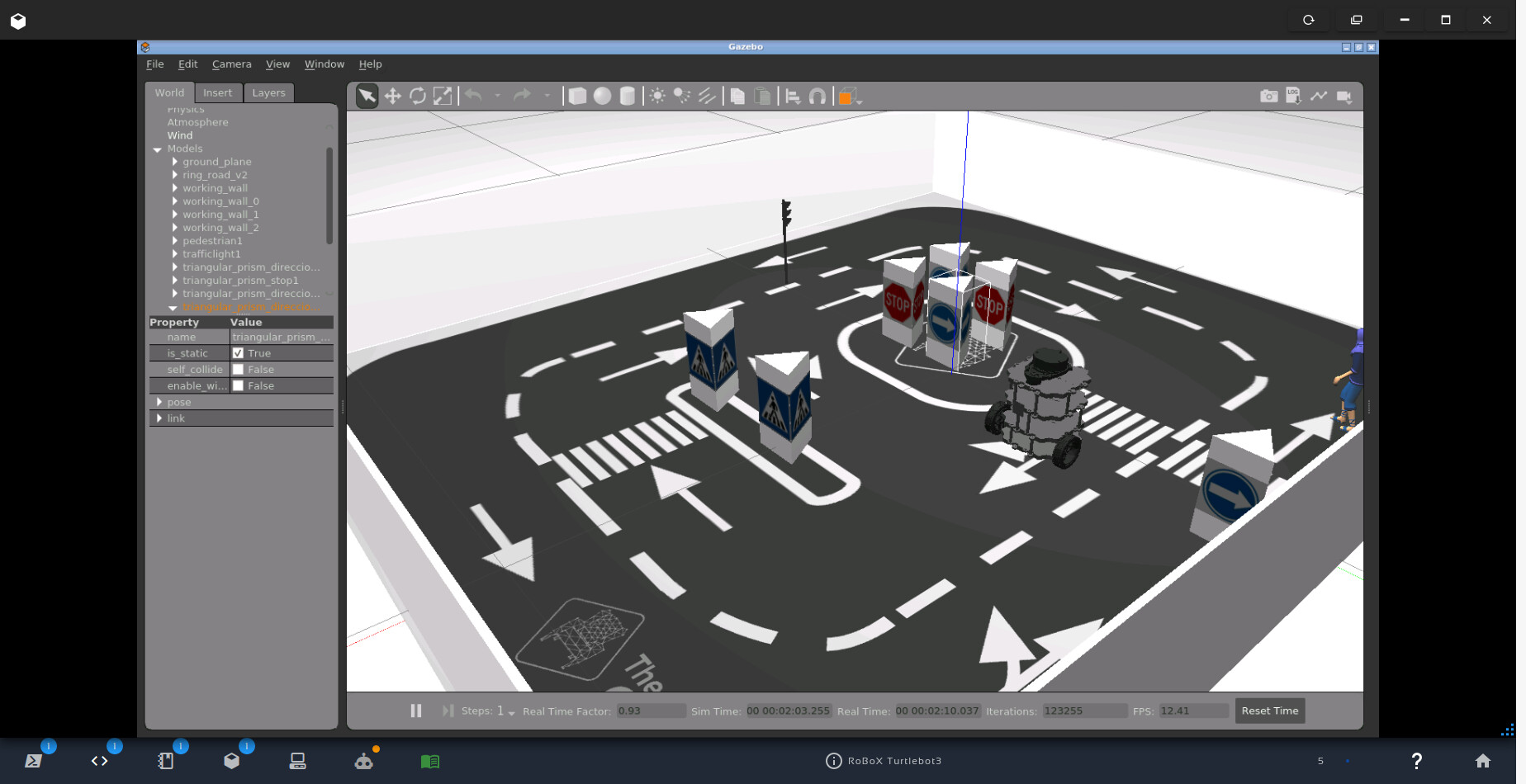
Here’s a screenshot. The namespace errors are new after re-forking.
Hi,
Its working, just that the camera is zoomed in. I you zoom out in Gazebo you should see the turtlebot and all the simulation. Try that if not then download through teh IDE the simulations_ws and share it here so I can have a look.
2 Likes
Thanks a ton, that was it, Just zoomed out and saw the entire playing field. Thanks a lot for being patient!
2 Likes