Hello,
in the exercise 3.1, when i launched the my_robot_arm_demo.launch, it didn’t show me any error but the robots arm didn’t move or perform the trajectory.
Where is the problem?
Thanks for your help!
Hello,
in the exercise 3.1, when i launched the my_robot_arm_demo.launch, it didn’t show me any error but the robots arm didn’t move or perform the trajectory.
Where is the problem?
Thanks for your help!
Hi @delethai.mai,
Are you able to resolve this yet? If not, are you starting the service that moves the robot arm in your launch file, as hinted in this instruction snippet?
- Create a launch called my_robot_arm_demo.launch , that starts the /execute_trajectory service. As explained in the Example 3.3, this service is launched by the launch file start_service.launch , which is in the package iri_wam_reproduce_trajectory .
Thanks for your help, i have resolved the issue!
Hi,
my problem was that i had an error in my launch file. Can you show us the content of that?
Hi! I also came across the same problem. I copied the code from the solution but still the robot has no respond.
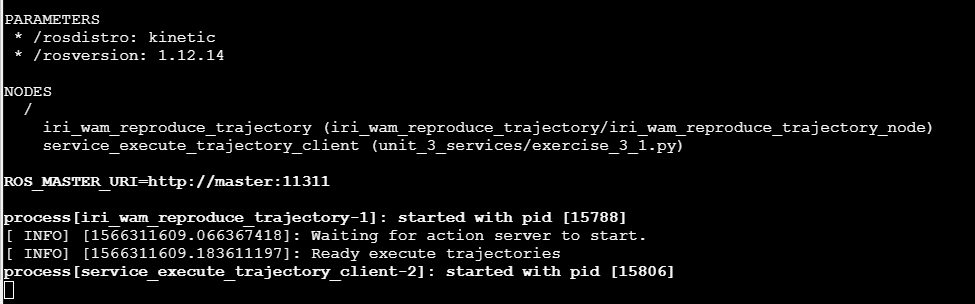
<launch>
<include file="$(find iri_wam_reproduce_trajectory)/launch/start_service.launch"/>
<!-- Here will go our python script that calls the execute_trajectory service -->
<node pkg ="unit_3_services"
type="exercise_3_1.py"
name="service_execute_trajectory_client"
output="screen">
</node>
</launch>@kailin.tong, it seems everything is fine in your case, as far as the launch file is concerned.
Please try the following:
Hi, I had managed to get it to work eventually. The problem has something to do with my internet connection because when I was using this on a faster network it worked like a charm. hoping this would help you out @kailin.tong