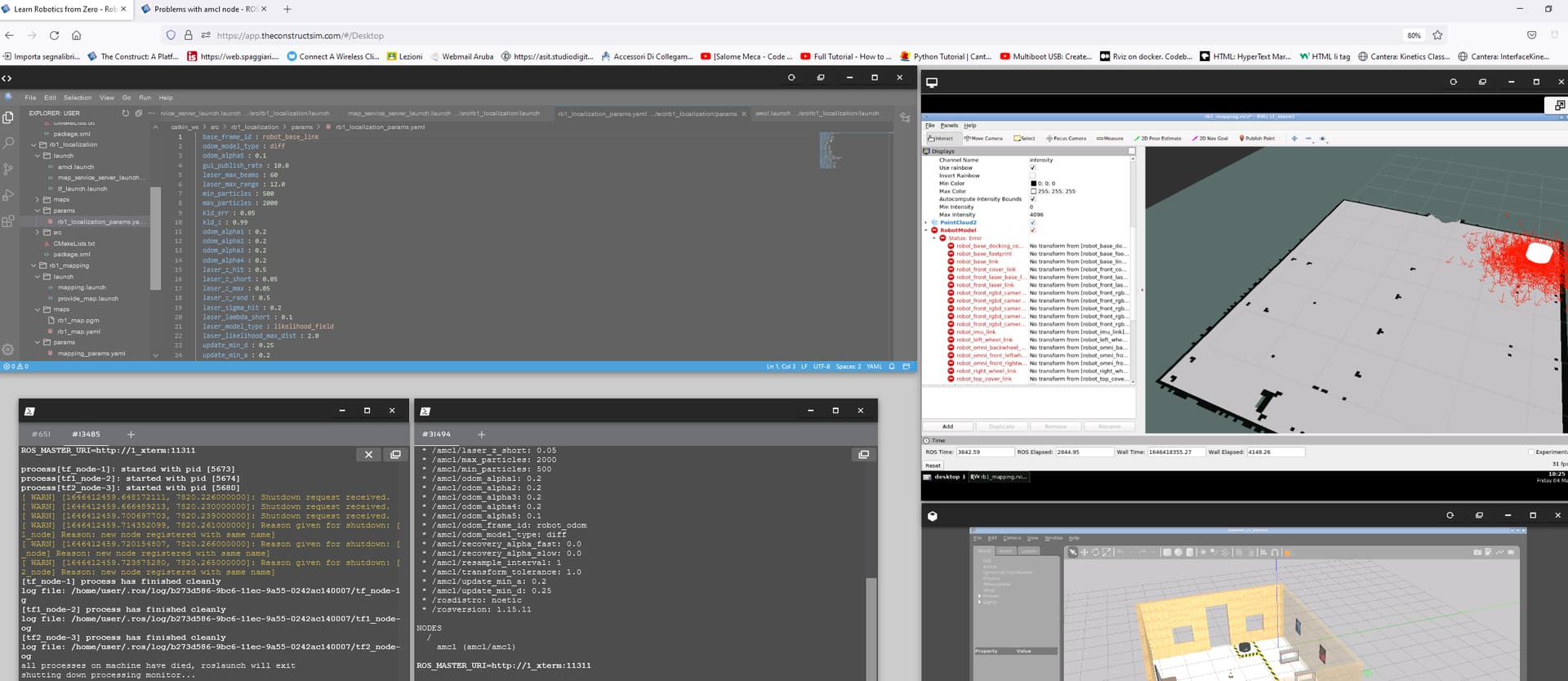
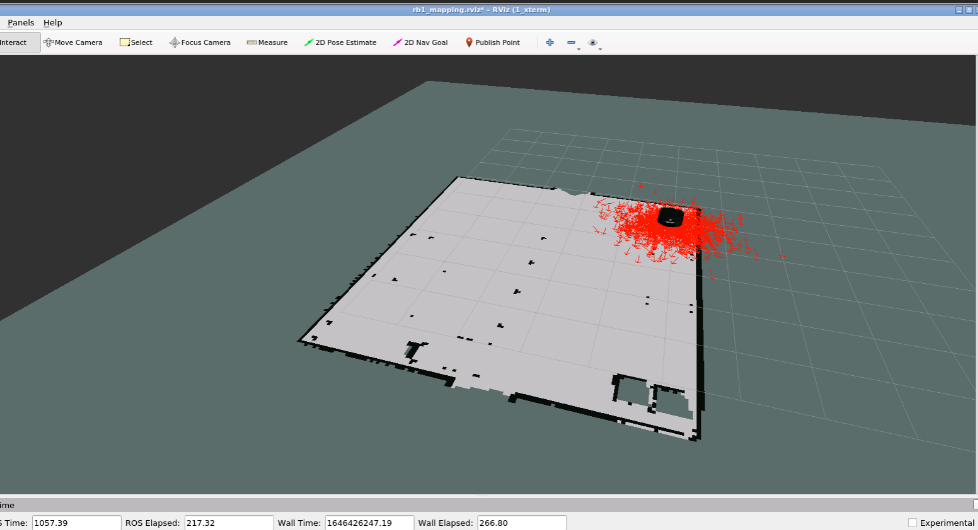
The amcl node that I configuted does not manage the map to robot_odom transformation
I post the lauch and params files
<node pkg="amcl" type="amcl" name="amcl">
<rosparam file="$(find rb1_localization)/params/rb1_localization_params.yaml" command="load"/>
</node>
odom_model_type : diff
odom_alpha5 : 0.1
gui_publish_rate : 10.0
laser_max_beams : 60
laser_max_range : 12.0
min_particles : 500
max_particles : 2000
kld_err : 0.05
kld_z : 0.99
odom_alpha1 : 0.2
odom_alpha2 : 0.2
odom_alpha3 : 0.2
odom_alpha4 : 0.2
laser_z_hit : 0.5
laser_z_short : 0.05
laser_z_max : 0.05
laser_z_rand : 0.5
laser_sigma_hit : 0.2
laser_lambda_short : 0.1
laser_model_type : likelihood_field
laser_likelihood_max_dist : 2.0
update_min_d : 0.25
update_min_a : 0.2
odom_frame_id : odom
resample_interval : 1
transform_tolerance : 1.0
recovery_alpha_slow : 0.0
recovery_alpha_fast : 0.0
thanks