Hi,
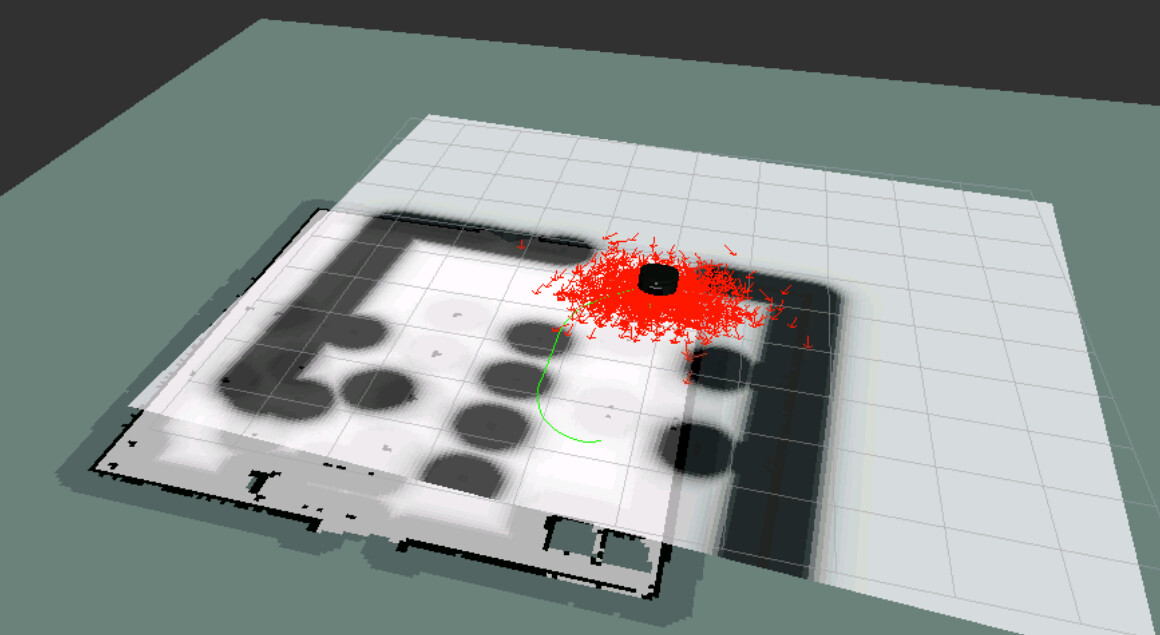
I set the move_base node. It seems to works but when I use 2D nav the robot doesn’t move
In the terminal:
…
process[move_base-1]: started with pid [19431]
process[map_server-2]: started with pid [19433]
process[amcl-3]: started with pid [19434]
[ INFO] [1646760864.870176714, 2504.953000000]: global_costmap: Using plugin “static”
[ INFO] [1646760864.903270734, 2504.980000000]: Requesting the map…
[ INFO] [1646760865.185321266, 2505.189000000]: Resizing costmap to 384 X 384 at 0.050000 m/pix
[ INFO] [1646760865.308092407, 2505.290000000]: Received a 384 X 384 map at 0.050000 m/pix
[ INFO] [1646760865.308147757, 2505.290000000]: Subscribing to updates
[ INFO] [1646760865.320380674, 2505.302000000]: global_costmap: Using plugin “inflation”
[ INFO] [1646760865.512145850, 2505.431000000]: local_costmap: Using plugin “obstacles_laser”
[ INFO] [1646760865.529441711, 2505.451000000]: Subscribed to Topics: laser
[ INFO] [1646760865.595139462, 2505.505000000]: local_costmap: Using plugin “inflation”
[ INFO] [1646760865.729018830, 2505.610000000]: Created local_planner dwa_local_planner/DWAPlannerROS
[ INFO] [1646760865.759981935, 2505.635000000]: Sim period is set to 0.20
[ INFO] [1646760866.397095181, 2506.117000000]: Recovery behavior will clear layer ‘obstacles’
[ INFO] [1646760866.419124535, 2506.132000000]: Recovery behavior will clear layer ‘obstacles’
[ INFO] [1646760866.554184591, 2506.236000000]: odom received!
[ INFO] [1646760889.541857874, 2523.874000000]: Got new plan (modificato)