Hi The Construct team,
I just finished my first session [8:30 AM to 8:55 AM CET] on Real Robot with ROS2 Navigation Rosject.
There seems to be several issues that I have noticed and I do not know what to do.
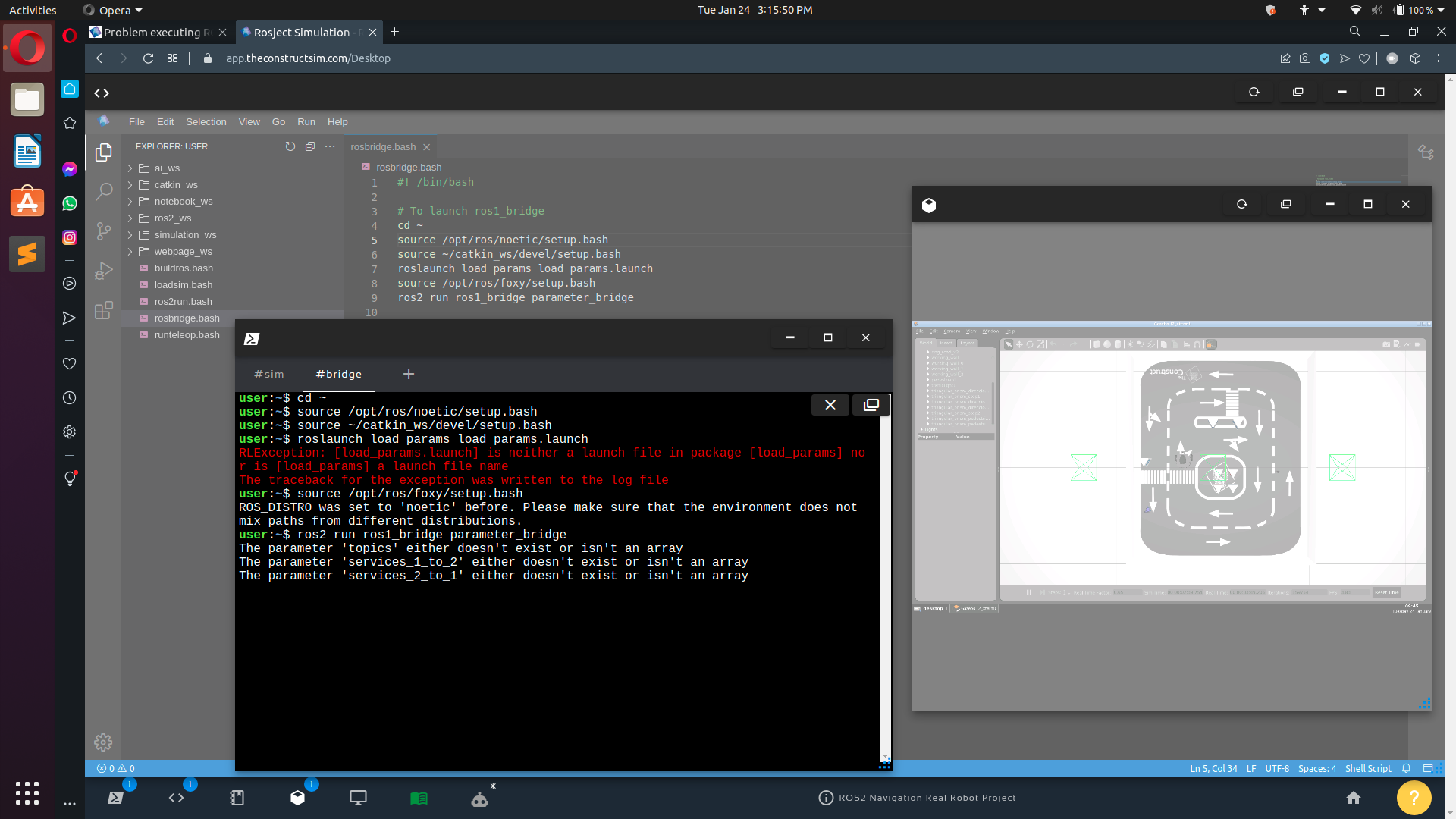
- ROS Bridge [
dynamic-bridgetobridge-all-topics] is painfully slow. - Mapping with Cartographer node never starts. It started in one of my attempts and just hanged.
- Rviz2 was very unresponsive (although not a serious issue since cartographer never worked).
Each time when I terminated and restarted cartographer launch file, I kept getting the following errors:
user:~/ros2_ws$ ros2 launch my_turtlebot_navigation init_mapping.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2023-01-24-07-52-41-205642-3_xterm-9175
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [cartographer_node-1]: process started with pid [9177]
[INFO] [occupancy_grid_node-2]: process started with pid [9179]
[cartographer_node-1] [INFO] [1674546761.310223574] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/home/user/ros2_ws/install/my_turtlebot_mapping/share/my_turtlebot_mapping/config/cartographer.lua' for 'cartographer.lua'.
[cartographer_node-1] [INFO] [1674546761.310574418] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1674546761.310638397] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1674546761.310725430] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1674546761.310766807] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1674546761.310985118] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1674546761.311050130] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1674546761.311144498] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1674546761.311202663] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1674546761.311386968] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1674546761.311562709] [cartographer_ros]: I0124 07:52:41.000000 9177 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1674546761.331568896] [cartographer_ros]: I0124 07:52:41.000000 9177 submap_2d.cc:187] Added submap 1
[cartographer_node-1] [INFO] [1674546761.331629831] [cartographer_ros]: I0124 07:52:41.000000 9177 map_builder_bridge.cc:132] Added trajectory with ID '0'.
[occupancy_grid_node-2] [WARN] [1674546762.318947999] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546763.318959616] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546764.318974203] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546765.318961090] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546766.318924169] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546767.318925951] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546768.318921941] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546769.318915030] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546770.318910460] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546771.318899966] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546772.318901455] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546773.318970502] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546774.318886972] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546775.318794324] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546776.318819552] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546777.318901058] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546778.318772587] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546779.318873662] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546780.318859989] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546781.318853626] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[cartographer_node-1] Warning: Invalid frame ID "base_footprint" passed to canTransform argument target_frame - frame does not exist
[cartographer_node-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[cartographer_node-1] [INFO] [1674546781.558798225] [cartographer_ros]: I0124 07:53:01.000000 9177 ordered_multi_queue.cc:172] All sensor data for trajectory 0 is available starting at '638101435809406491'.
[cartographer_node-1] [INFO] [1674546781.559449631] [cartographer_ros]: I0124 07:53:01.000000 9177 collated_trajectory_builder.cc:72] scan rate: unknown
[cartographer_node-1] [INFO] [1674546781.559575979] [cartographer_ros]: I0124 07:53:01.000000 9177 local_trajectory_builder_2d.cc:138] Extrapolator is still initializing.
[occupancy_grid_node-2] [WARN] [1674546782.318868540] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546783.318861743] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546784.318847022] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546785.318837605] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546786.318767708] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546787.318835775] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546788.318833797] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546789.318819257] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546790.318812526] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546791.318818523] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546792.318803186] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546793.318800361] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546794.318797876] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546795.318793043] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546796.318786565] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546797.318817377] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546798.318778158] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546799.318782641] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546800.318764677] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546801.318755700] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546802.318758450] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546803.318773442] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546804.318763147] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546805.318747330] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546806.318738816] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546807.318738780] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546808.318728443] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546809.318727030] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546810.318737653] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546811.318738251] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546812.318709025] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546813.318706367] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546814.318699471] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546815.318696865] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546816.318688163] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546817.318686589] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546818.318683108] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546819.318676257] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546820.318671229] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546821.318672029] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546822.318666700] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546823.318668170] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546824.318653633] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546825.318649334] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546826.318649580] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546827.318647968] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546828.318631734] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546829.318658135] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546830.318646446] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546831.318659006] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546832.318619336] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546833.318612465] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546834.318606450] [occupancy_grid_node]: submap_slices and last_frame_id is empty
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[occupancy_grid_node-2] [INFO] [1674546835.034902590] [rclcpp]: signal_handler(signal_value=2)
[cartographer_node-1] [INFO] [1674546835.034903957] [rclcpp]: signal_handler(signal_value=2)
[cartographer_node-1] [WARN] [1674546835.041903976] [cartographer_ros]: W0124 07:53:55.000000 9177 tf_bridge.cc:67] Lookup would require extrapolation into the past. Requested time 1674546781.281196 but the earliest data is at time 1674546832.761798, when looking up transform from frame [odom] to frame [base_footprint]
[cartographer_node-1] terminate called after throwing an instance of 'std::runtime_error'
[cartographer_node-1] what(): could not count subscribers: rcl node's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.11/src/rcl/node.c:441
[INFO] [occupancy_grid_node-2]: process has finished cleanly [pid 9179]
[ERROR] [cartographer_node-1]: process has died [pid 9177, exit code -6, cmd '/opt/ros/foxy/lib/cartographer_ros/cartographer_node -configuration_directory /home/user/ros2_ws/install/my_turtlebot_mapping/share/my_turtlebot_mapping/config -configuration_basename cartographer.lua --ros-args -r __node:=cartographer_node --params-file /tmp/launch_params__1yown76'].
user:~/ros2_ws$
The one time when cartographer node actually started and later hanged:
user:~/ros2_ws$ ros2 launch my_turtlebot_navigation init_mapping.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2023-01-24-07-45-34-771372-3_xterm-6588
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [cartographer_node-1]: process started with pid [6591]
[INFO] [occupancy_grid_node-2]: process started with pid [6593]
[cartographer_node-1] [INFO] [1674546334.876524914] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/home/user/ros2_ws/install/my_turtlebot_mapping/share/my_turtlebot_mapping/config/cartographer.lua' for 'cartographer.lua'.
[cartographer_node-1] [INFO] [1674546334.876905995] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1674546334.876970798] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1674546334.877074057] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1674546334.877135002] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1674546334.877413017] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1674546334.877481775] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1674546334.877587645] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1674546334.877649575] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1674546334.877838914] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1674546334.877905942] [cartographer_ros]: I0124 07:45:34.000000 6591 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1674546334.897890016] [cartographer_ros]: I0124 07:45:34.000000 6591 submap_2d.cc:187] Added submap 1
[cartographer_node-1] [INFO] [1674546334.897962163] [cartographer_ros]: I0124 07:45:34.000000 6591 map_builder_bridge.cc:132] Added trajectory with ID '0'.
[occupancy_grid_node-2] [WARN] [1674546335.885654181] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546336.885686517] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546337.885668223] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546338.885667379] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546339.885670216] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546340.885664093] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546341.885717022] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546342.885666636] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546343.885671132] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546344.885673669] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546345.885707378] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546346.885676475] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546347.885676120] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546348.885676622] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546349.885712773] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546350.885678366] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546351.885682733] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546352.885696229] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1674546353.885703305] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[cartographer_node-1] [INFO] [1674546354.510247106] [cartographer_ros]: I0124 07:45:54.000000 6591 ordered_multi_queue.cc:172] All sensor data for trajectory 0 is available starting at '638101431538204861'.
[cartographer_node-1] [INFO] [1674546354.512325982] [cartographer_ros]: I0124 07:45:54.000000 6591 collated_trajectory_builder.cc:72] scan rate: unknown
[cartographer_node-1] [INFO] [1674546354.512431454] [cartographer_ros]: I0124 07:45:54.000000 6591 local_trajectory_builder_2d.cc:138] Extrapolator is still initializing.
[cartographer_node-1] [INFO] [1674546380.200287964] [cartographer_ros]: I0124 07:46:20.000000 6591 collated_trajectory_builder.cc:72] odom rate: 17.54 Hz 5.70e-02 s +/- -nan s (pulsed at 0.22% real time)
[cartographer_node-1] [INFO] [1674546380.200342236] [cartographer_ros]: I0124 07:46:20.000000 6591 collated_trajectory_builder.cc:72] scan rate: 7.86 Hz 1.27e-01 s +/- 1.39e-02 s (pulsed at 5708.53% real time)
[Hanged right here ^^^. No new messages even when the robot was moved with teleop or on-screen joystick]
I forgot to capture the tf2 frames in this session. I will get it next time.
When I Google the following problem, I don’t get any favorable solutions.
[occupancy_grid_node-2] [WARN] [1674546353.885703305] [occupancy_grid_node]: submap_slices and last_frame_id is empty
What I tried so far:
- Changed map resolution from 0.01 to 0.05 and finally to 0.1. The problem persists in all cases.
- Tried starting {ROS Bridge, Rviz2 and Cartographer Node} in at least 6 different combinations (out of 8 possible combinations). The problem was still happening.
Can someone please help me out with this?
Thanks,
Girish