Hello,
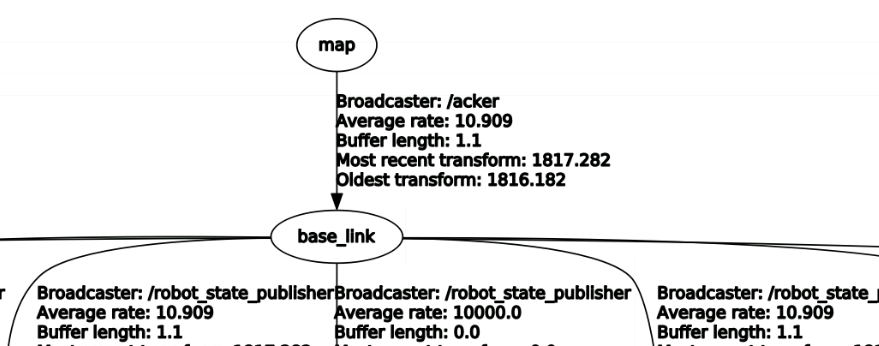
I wanted to modify the configuration files for the course project (section 5) but I could not find odometry topic. To find it, first I used rqt_tf_tree which shows that before base_link we have map link (I guess it should be the odom frame):
It shows that the /acker node is the broadcaster. Then I used:
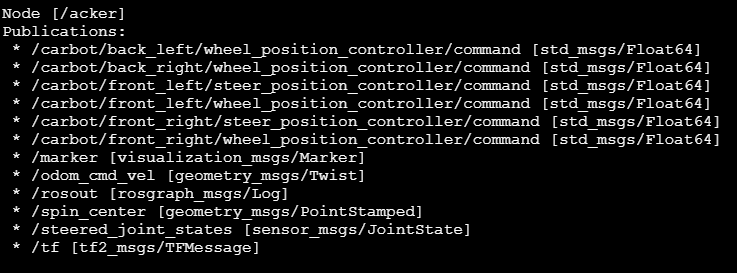
rosnode info /acker
which shows that it publishes no topic with nav_msgs/Odometry message:
I also did the same to /gazebo node but I could not find the odom topic!
could you please help me in this regard?
Hi,
I think you might be confusing the topic /odom with the frame odom. You do not need the rqt_graph to check for the /odom topic, what you do is introspection (rostopic list).
There you can check if the topic exists. Usually the driver for odometry and velocity is launched on the simulation side, so it should always be there. Maybe restarting the simulation will make it appear?
On the other hand, the odom frame is also usually published by the gazebo plugin that makes the robot move. Are you launching a program that is publishing the map frame or is that graph appearing at startup?
Please share some screenshots if it doesn’t work
Hello,
Thanks for your response. I know that the frame and topic are different. I used (rostopic list) but I could not find the topic related to odom.
As I remember from Gazebo course, the odom frame and odom topic can be defined using gazebo plugin when we want to connect the robot model to ROS. Based on the definition, the odom frame is the place where our robot is initialized, so there should be a connection between odom frame and base_link (That’s why I used rqt_tf_tree to find the odom frame). I need to mention that the “map frame” appeared in the figure when I used rqt_tf_tree in section 5 of this course, so I thought they named the odom frame “map”!
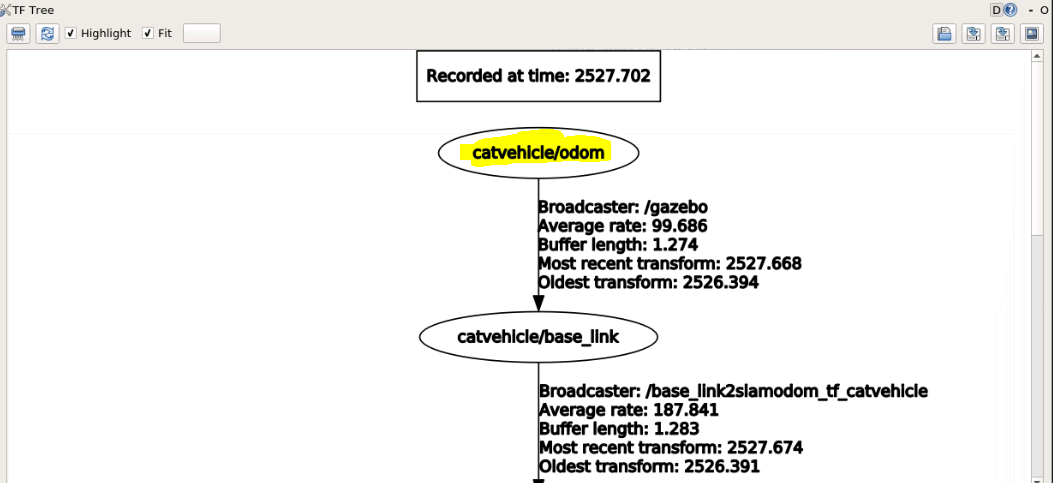
I used this method to find the odom frame, for example, in section 4, rqt_tf_tree shows the odom frame:
In addition, the odom frame has a broadcaster node (/acker). I think the Broadcaster node can reveal odom topic (that is why then I used rosnode info). This is a method that I considered as a general approach for finding the odom frame and topic, and it worked for other simulations. But in Section 5 I did not find any topic with nav_msgs/Odometry msg.
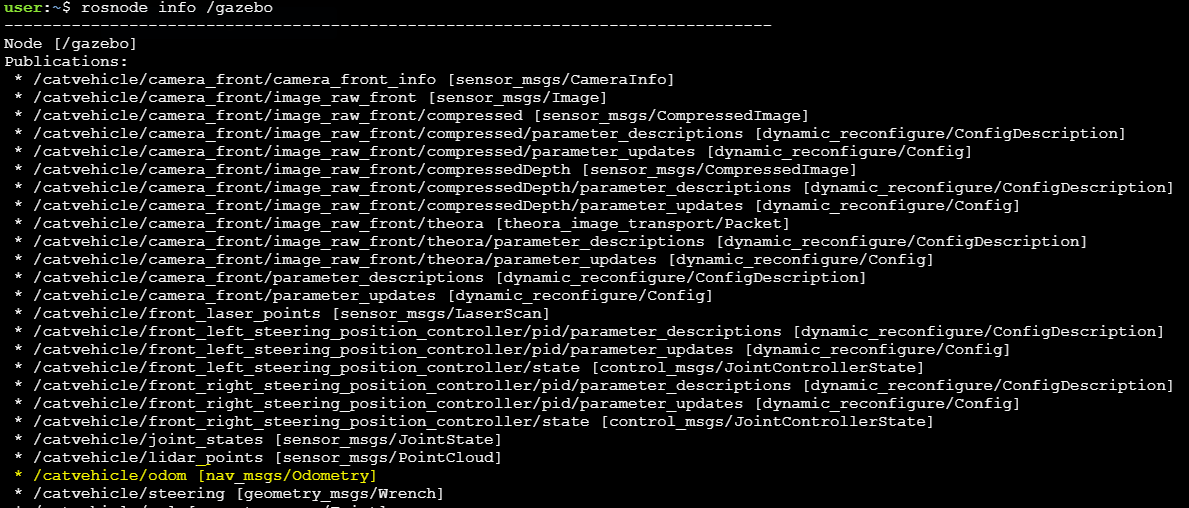
Again the approach above worked in other simulations. For example, in section 4, the broadcaster was /gazebo, then:
In summary, I thought that the approach above would work and give me the name of the odom frame and odom topic if a developer called the odom frame or odom topic a random name (not necessarily contain odom in it) even if I did not access the urdf files.
Please let me know If I am wrong. Also, please let me know how to do the mini project (section 5).