At the end of 3 - Creating a simulation of the robot everything works fine in gazebo but in RVIZ, I am getting the error No transform from [base_footprint] to [base_link] in Robot Model - Status. Also, the status of wheel_left_link and wheel_right_link flickers between Transform OK and No transform from wheel_left(or right)_link to base link. I followed all the instructions twice so I am not quite sure where I went wrong. Any help would be appreciated. The Gazebo model drives around just fine and the camera works, as does the IMU.
1 Like
Hello @derforwarder,
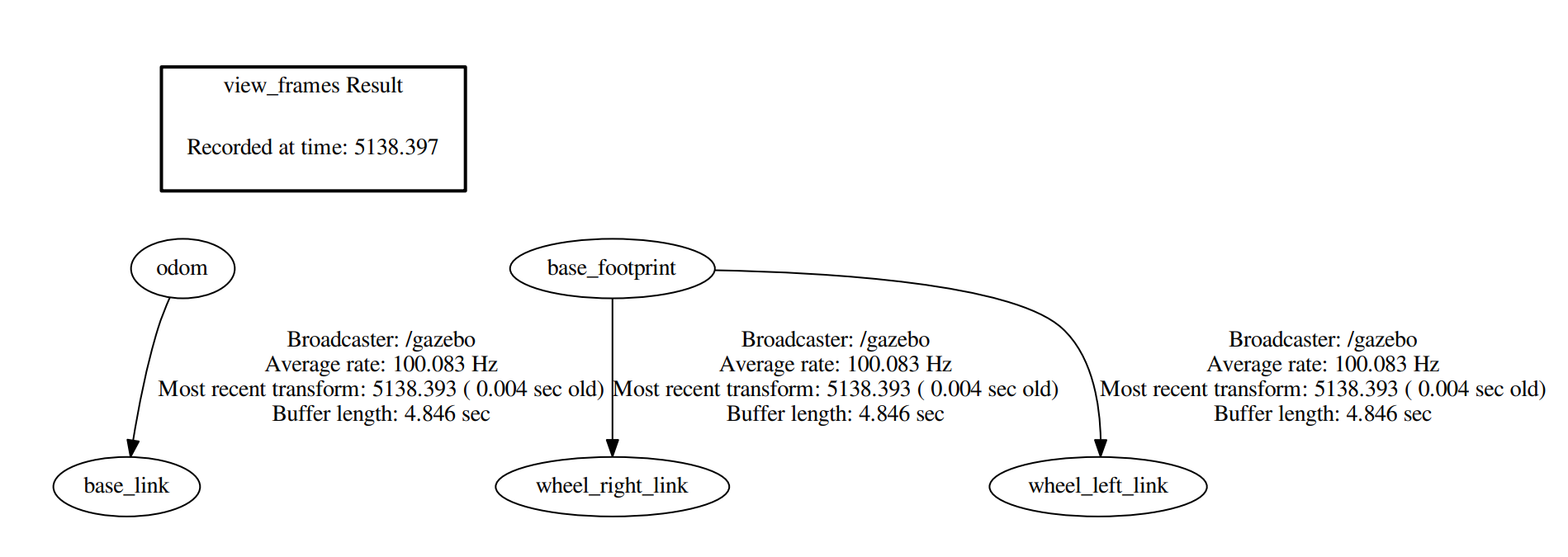
Does this happen all the time to you? Or it was just a punctual error? I’ve been doing some tests right now and it’s working OK for me. Also, it’s strange that you see this TF warnings but your simulation is working fine. Have a look at the TF tree with the following command:
rosrun tf view_frames
and verify that your TFs look like this:
Best,
This was happening for me as well, although it seemed specific to rviz. Gazebo looked fine.
1 Like
I think that could be some kind of bug since I found this:
There is actually no link name “odom” in this course but somehow it just show up when I print out the tf tree.
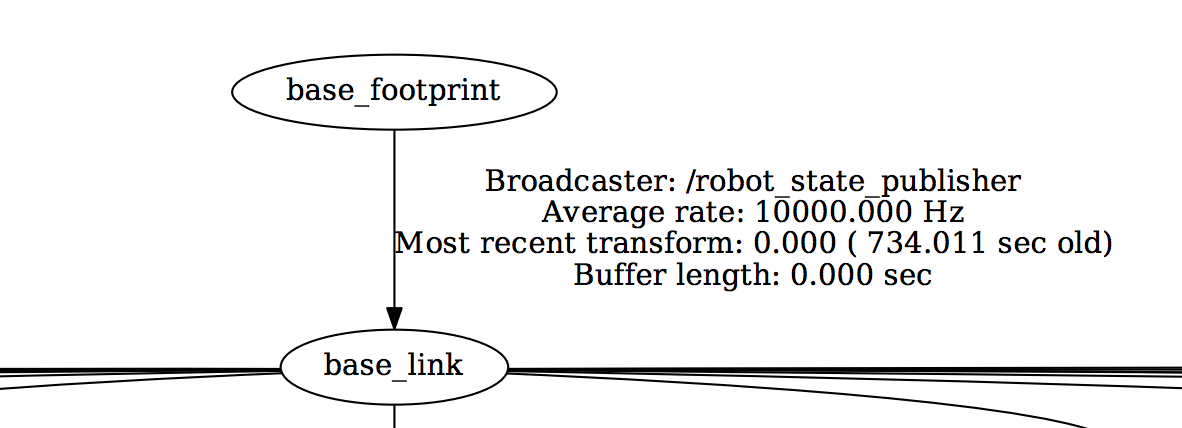
For what it’s worth this continues to happen. I get the same error. And frames.pdf also shows no joint between base_link and base_footprint. Things look fine in Gazebo.
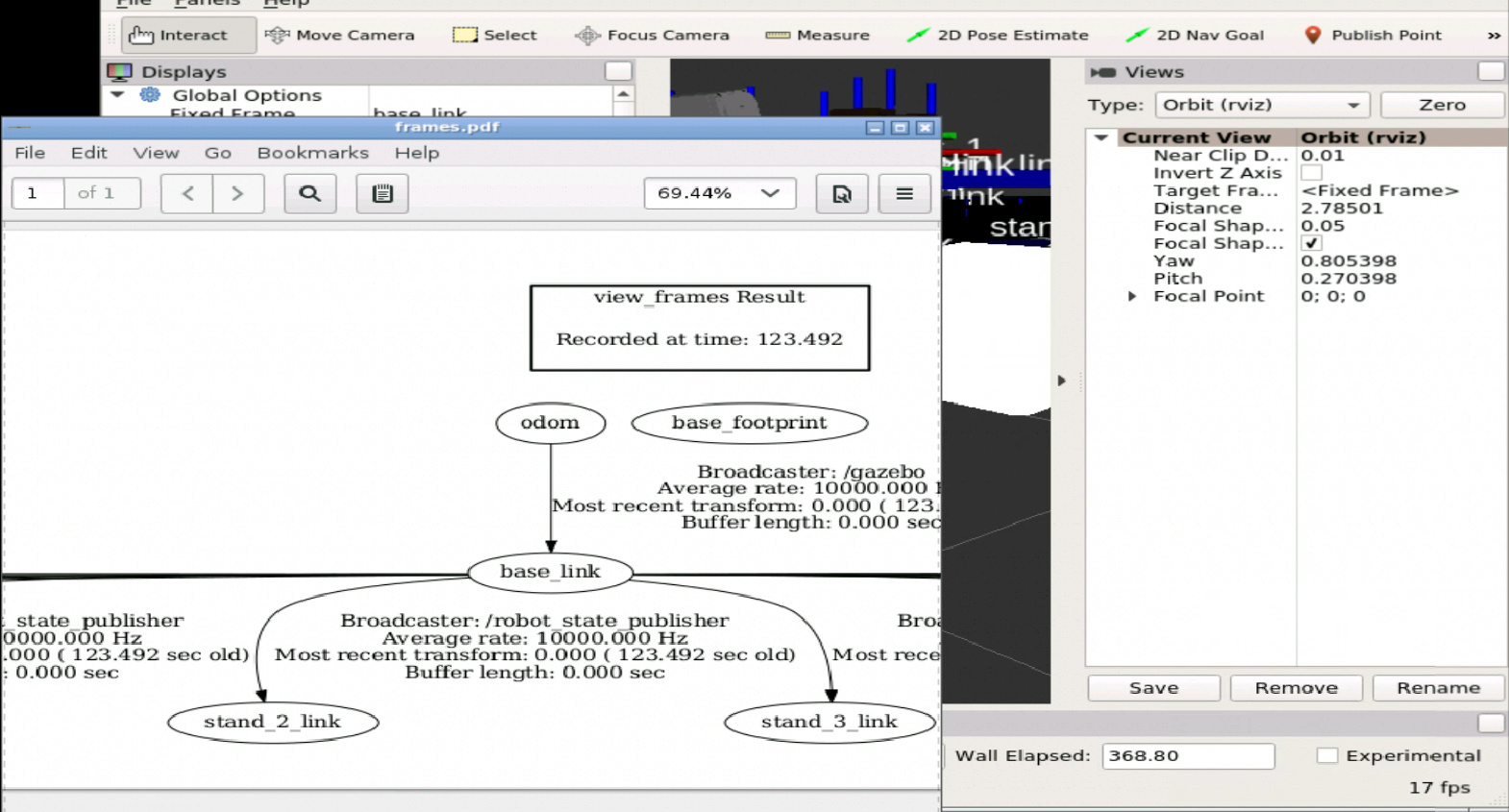
If I stop RVIZ, kill the model and then respawn it (without starting RVIZ), I get this:
The joints are clearly there in the URDF. Any ideas?
/K