Hi,
I am trying to implement GPS based autonomous navigation using dual ekf and navsat transform. Also referred the construct materials but I am unable to refine the implementation
I urgently need help for my project. For weeks , I have been trying to improve , also tried adding amcl to the stack, tried changing yaml config for the fusion but. My dealine is in a week and I have to fix this .I would really appreciate if you someone can guide me asap please!!.
I am attaching a video here as to how the visualization on rviz looks like and the description of the problem is as follows
Issue:
1)The robot position drifts as I move it in its environment and the orientation of the robot on RVIZ is also not facing the correct way when compared to the actual orientation. There is a 180 degrees shift in its orientation.To help you understand the drift, on the video , the robot is actually moving in the direction indicated by the green arrow.
-
The odometry/gps output from navsat_transform doesnt match odometry/filtered and odometry/filtered_map. While both the local and global odometry (i.e odometry/filtered and odometry/filtered_map match each other). I tried adding the magnetic declination and the yaw_offset (imu/data yaw value was not zero when facing magnetic north) in the navsat_transform parameters.
-
On RVIZ, the odom frame position and orientaion on TF is not stable, it changes.
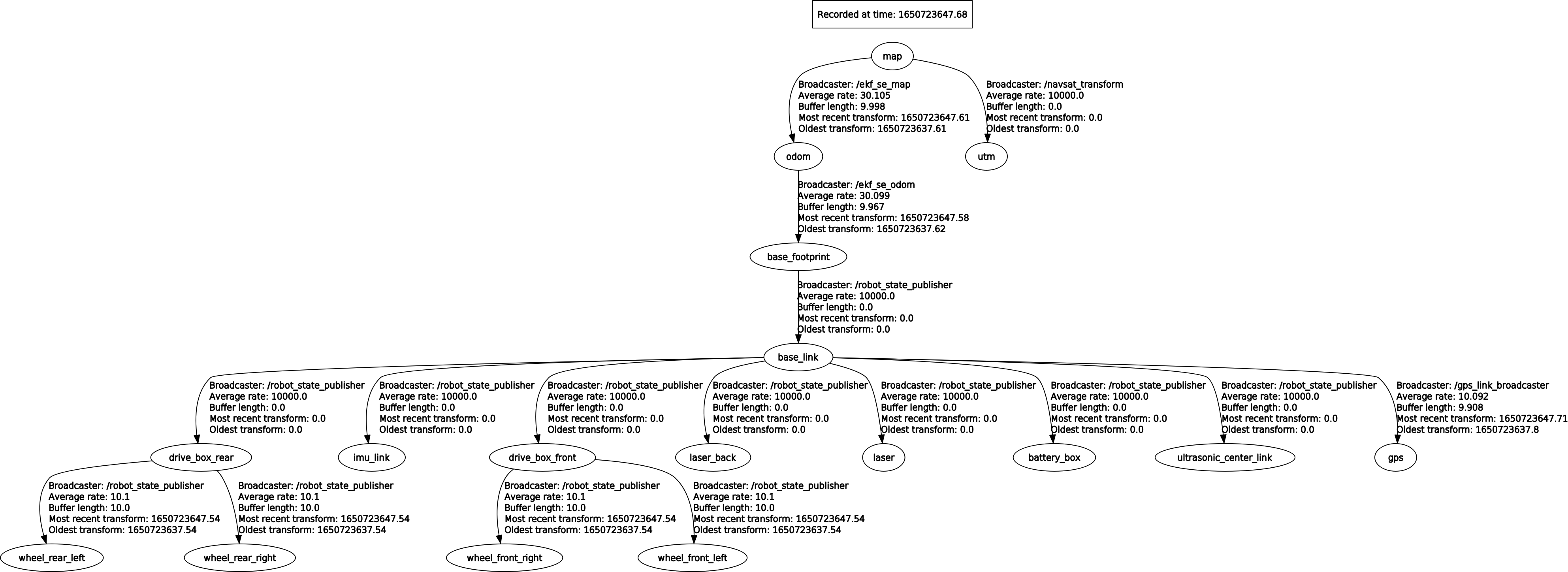
Map_frame: map
Odom_frame: odom
Base_link frame: Base_footprint
Please help me fix them.
Here are my file contents
- Dual_ekf_navsat.yaml
ekf_se_odom:
frequency: 30
sensor_timeout: 0.1
two_d_mode: true #false
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
map_frame: map
odom_frame: odom
base_link_frame: base_footprint #base_link
world_frame: odom
odom0: odom #odometry/wheel
odom0_config: [false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]
odom0_queue_size: 10
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
imu0: imu/data
imu0_config: [false, false, false,
true, true, false,
false, false, false,
true, true, true,
true, true, true]
imu0_nodelay: false
imu0_differential: false
imu0_relative: false
imu0_queue_size: 10
imu0_remove_gravitational_acceleration: true
use_control: false
process_noise_covariance: [1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3]
initial_estimate_covariance: [1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0]
ekf_se_map:
frequency: 30
sensor_timeout: 0.1
two_d_mode: true #false
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
map_frame: map
odom_frame: odom
base_link_frame: base_footprint #base_link
world_frame: map
odom0: odom #odometry/wheel
odom0_config: [false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]
odom0_queue_size: 10
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
odom1: odometry/gps
odom1_config: [true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom1_queue_size: 10
odom1_nodelay: true
odom1_differential: false
odom1_relative: false
imu0: imu/data
imu0_config: [false, false, false,
true, true, false,
false, false, false,
true, true, true,
true, true, true]
imu0_nodelay: true
imu0_differential: false
imu0_relative: false
imu0_queue_size: 10
imu0_remove_gravitational_acceleration: true
use_control: false
process_noise_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3]
initial_estimate_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0]
navsat_transform:
frequency: 30
delay: 3.0
magnetic_declination_radians: 0.081681408993 # For lat/long 55.944831, -3.186998
yaw_offset: 0.795 #1.570796327 IMU reads 0 facing magnetic north, not east
zero_altitude: true #false
broadcast_utm_transform: true
publish_filtered_gps: true
use_odometry_yaw: false
wait_for_datum: false
2)Launch file:
dual_ekf_navsat.launch
<launch>
<!-- Starting various launch files for starting up the robot -->
<include file="$(find innok_heros_driver)/launch/heros_all.launch" />
<include file="$(find innok_heros_navigation)/launch/innok_AngularBoundsFilter.launch" />
<include file="$(find innok_heros_navigation)/launch/innok_laserscan_multi_merger.launch" />
<!-- Run the Map Server-->
<include file="$(find gps_module)/launch/start_map_server.launch"/>
<!-- Run Move Base-->
<include file="$(find gps_module)/launch/with_map_move_base.launch" />
<!--Run Navsat_transform and Move_base-->
<rosparam command="load" file="$(find gps_module)/config/dual_ekf_navsat.yaml" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se_odom" clear_params="true"/>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se_map" clear_params="true">
<remap from="odometry/filtered" to="odometry/filtered_map"/>
</node>
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" clear_params="true">
<remap from="odometry/filtered" to="odometry/filtered_map"/>
<remap from="imu/data" to="imu/data"/>
<remap from="gps/fix" to="fix"/>
</node>
</launch>
Video link
TF_tree
Node_Graph

Please tell me how I can fix them