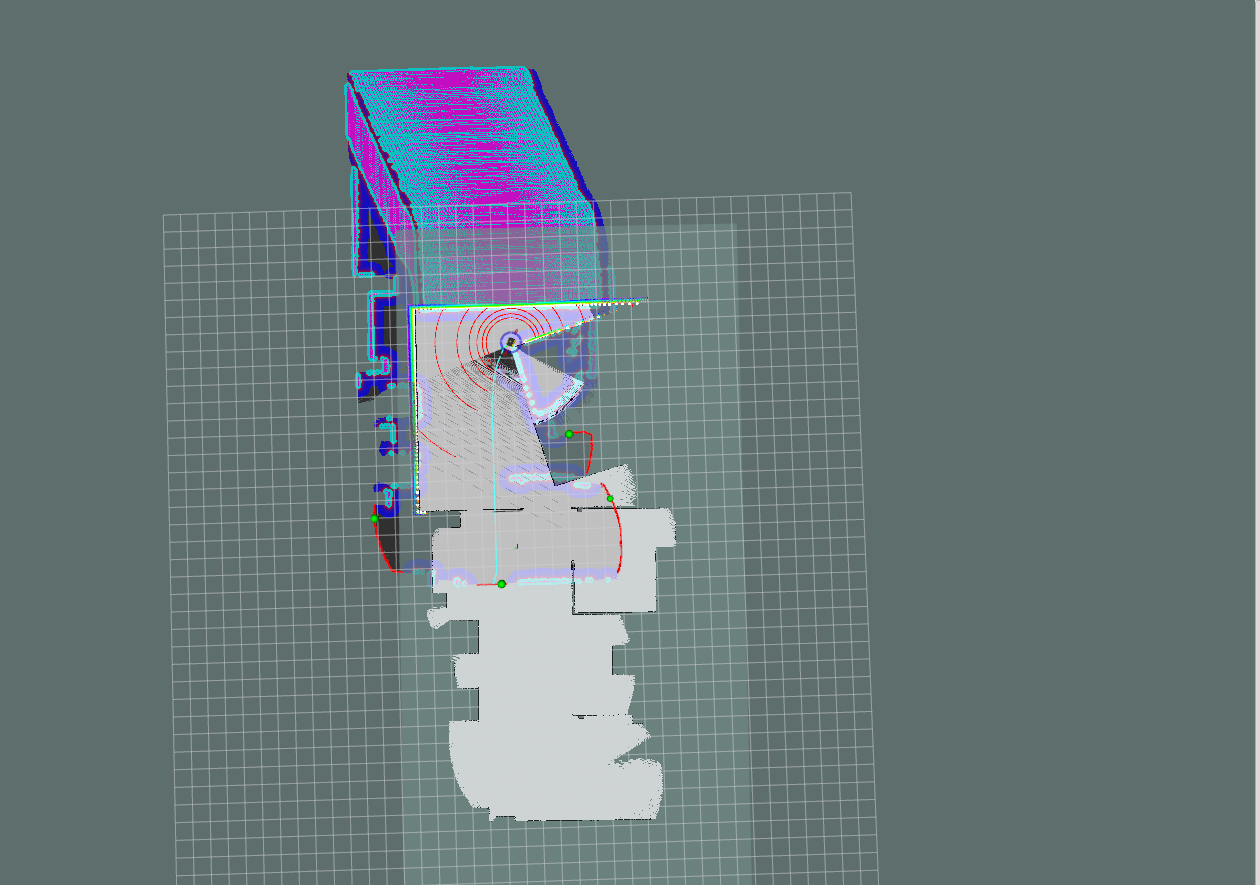
In shown the image the robot was given a goal pose (I am using Navfn global planner + dwa_local_planner) in unknown map (the map is being discovered during the robot motion). When the robot got stuck in its shown position and the recovery behaviors failed, the global costmap was shown to be repeated in a creeping way!!! Why is this happening? and Is there a way to fix it?
It is not from a course here on “The Construct”. It is a project that I am working on, where I use explore_lite package to explore and map an unknown environment. That makes me ask another question, is there a recommendation for what best exploration algorithm there is to make the robot discover unknown environments?