Hello ROS Developers,
I am working on one ROS project, in which I would like to have suggestion from your side.
Elaborate Issue:
• I did modelling of 2 robot using URDF file. You can see the picture of my robots below. This is simplified version just to model the robot’s DOF.
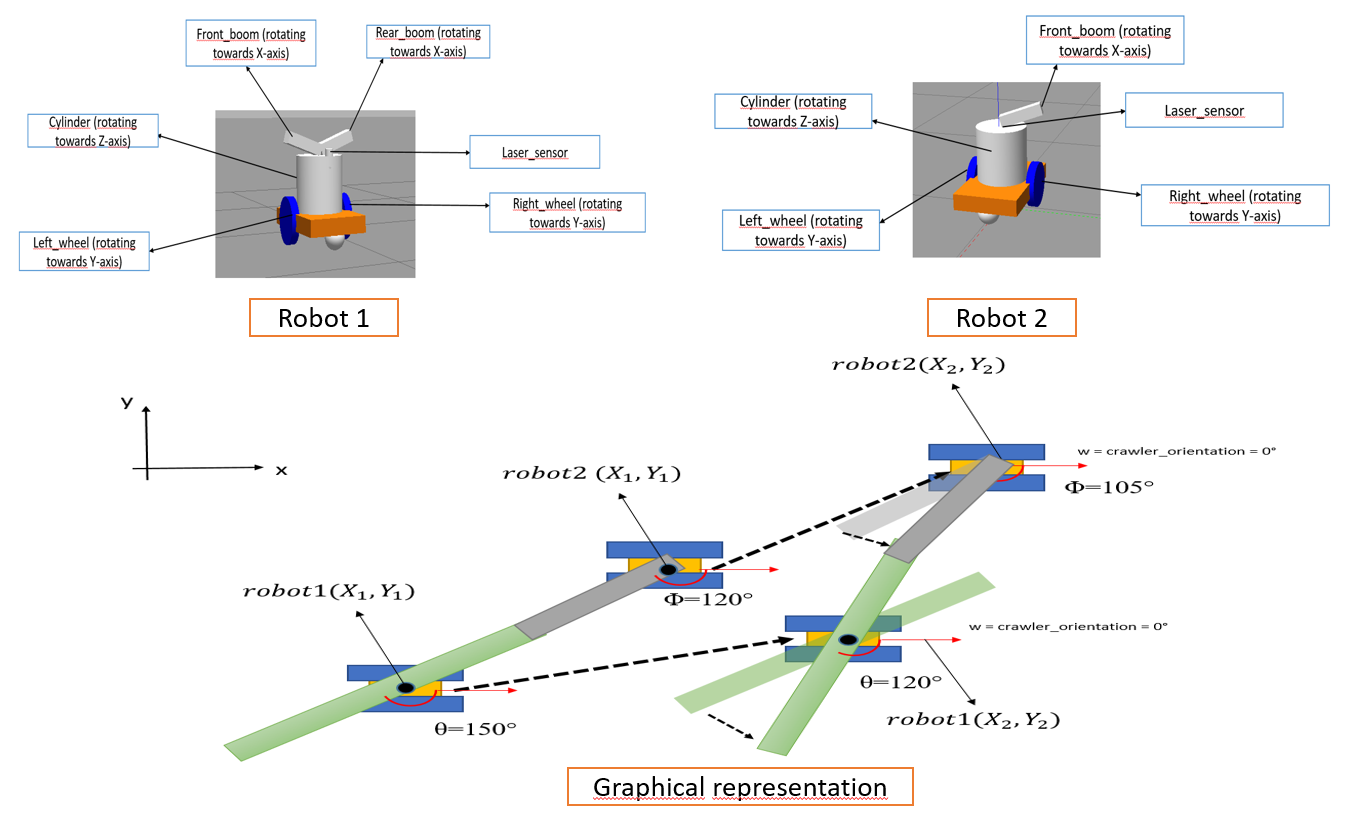
• I would like to navigate my two robots so that the first robot navigates freely through the environment and the second robot follows the first one by maintaining their booms aligned, according to above graphical representation.
• As per my research, ROS offers the possibility to navigate multiple robots independently with their own goal points, path planning, move base group etc. In my case however, only robot1 can move freely in the environment, while robot2 must follow the rear_boom from robot1. So rear_boom from robot1 must be always aligned but all the application I saw until now consider a goal position in regard to the robot center position. So, how could I achieve the above mentioned task by keeping then aligned in regards to their booms?