Hello everyone, I would like to ask to the community that how can I model an environment in which a robot(mobile manipulator ) apply a force to the box in a perpendicular direction to the wall to stop slipping over a vertical wall. I know that I have to model frictions between box and wall,but is it possible to do so , where I can get more help on this topic, what are the things that i need to change in gazebo model file to achieve this
I would be really appreciated if someone can help me with this topic!
hqdefault|480x360
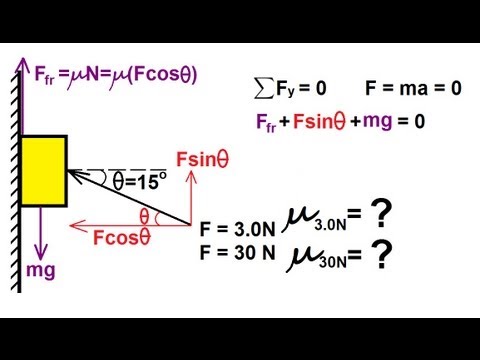
something like shown in the figure , but in my case force will be applied in perpendicular direction by the robot.
Hi,
Friction is models with the gazebo parameters mu and mu2 ( static and dynamic friction ). Also Kp and kd ( for simulating softness of material ). Playing around with that you should be able to model perfectly that. You have to also pay attention to the friction parameters of the part of the robot that will touch the object, its geometry ( that has to be if possible a basic geometric primitive shape, ODE physics engine works better there ) and also monitor the joint efforts of the robot to avoid unrealistic force on the object.
Create a ROSject in ROSdevelopement studio and post it here so the community can help you in anything you might need.
{kind=link}