Hi, I am learning the developing web interface and trying to implement in on my real robot.
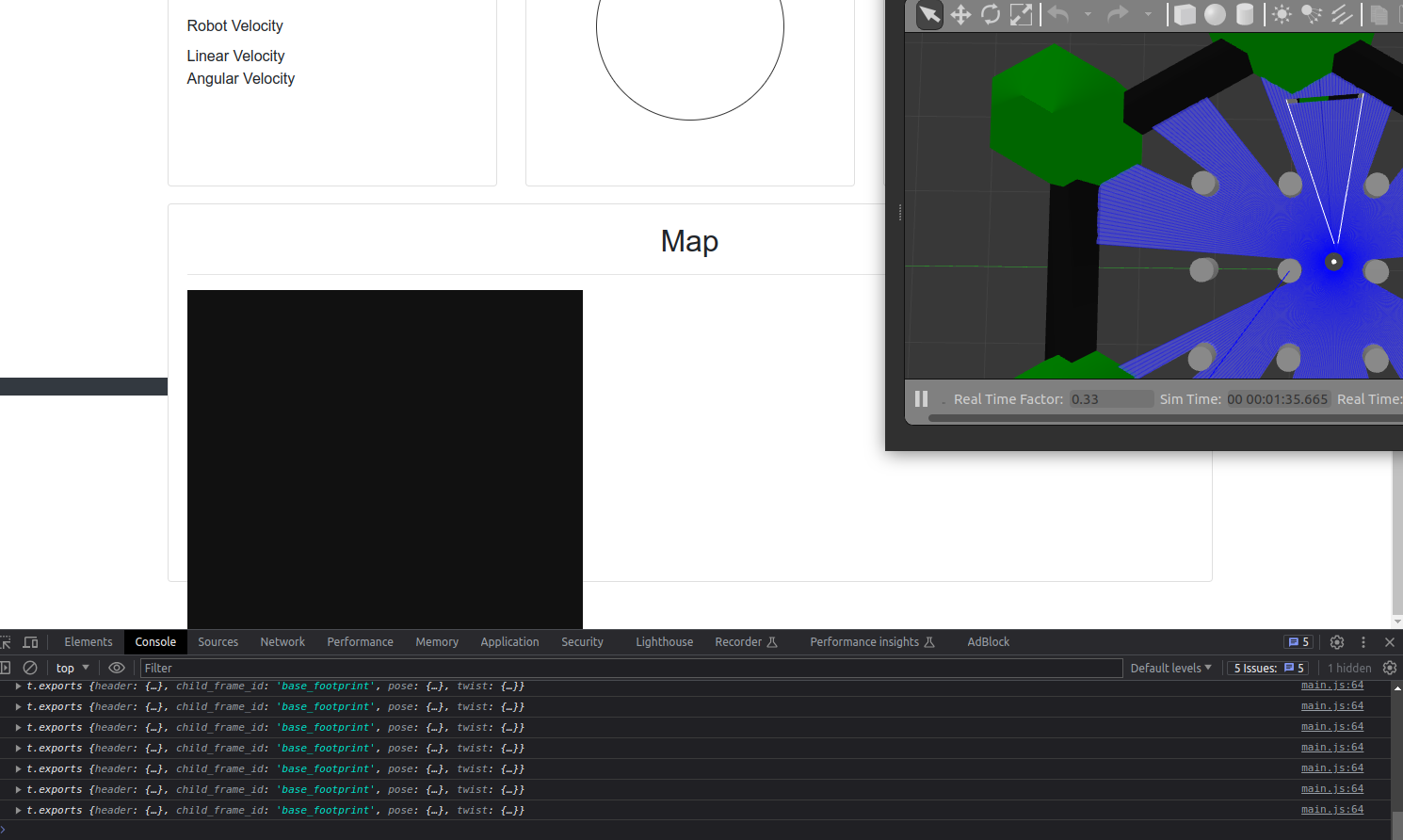
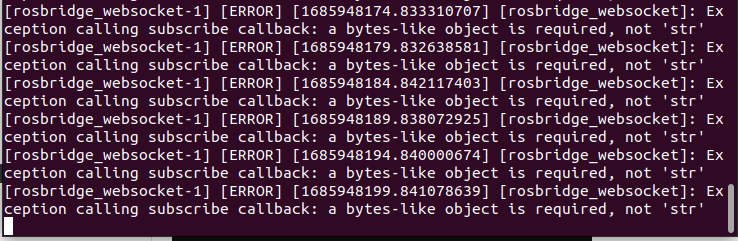
In the course, I am be able to show the map being generated as the robot do mapping, but when I follow the exact same steps and code, there is an error as follow:
The step I did:
- Run turtlebot3_gazebo turtlebot3_world.launch
- Run slam_toolbox online_asnyc_mapper
- Run rosbridge and the http.server
Does anyone have the same problem or know the solution for this?
Thank you.
ROS2 Humble
Ubuntu 22.04
Latest javascript librarty found in RoboWebTool repository for ros2d, roslib, easel, eventemitter2
Latest rosbrige_server