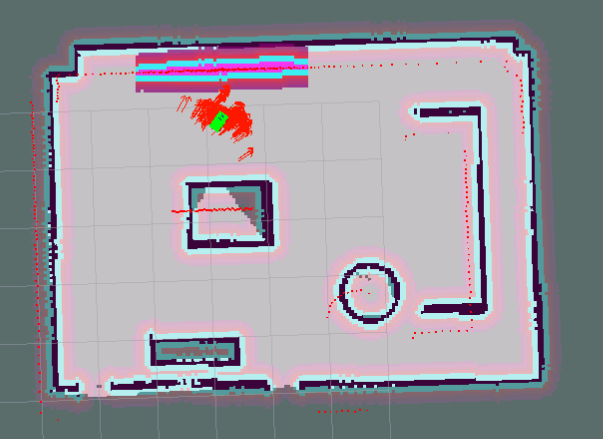
When I first start the Navigation, the local map and the global map match well. When I press 2D_Nav_Goal in RViz, the robot’s position starts to move as the navigation progresses and the local and global maps don’t match. How can I fit the robot’s location (Local Map) to the Global Map?
I am writing my robot code, following the ROS_Navigation_5_Days course. I’m adjusting Local & Global Cost Map parameters in Path Planning.