how to run whole simulation in my own pc rather than webshell
I thought it is not possible
I think The Construct must be do some favour that all of us must be able to make practices in our home PC
If you would like to create your own simulation based on the same robot here in webshell. You would require the URDF file which could be converted from 3D design. Then you import the files in Gazebo, which will provide you with your own simulation environment.
Hi @nadeem ,
Welcome to this Community!
Before you can run simulations on your PC, you must have some basic packages installed.
- ROS Noetic Desktop Version (comes with Gazebo)
- ROS2 Galactic Desktop Version (
Galacticif you use Ubuntu 20.04,Humbleif you use Ubuntu 22.04). You cannot install Humble on Ubuntu 20.04 - not worth the try or the effort. - Download necessary robot description and model packages.
- Create a simulation workspace for ROS1 and ROS2 and extract your robot simulation packages here.
- Create your ROS packages in the
catkin_wsorros2_wsworkspace. - Create launch files to load robot models on Gazebo along with your ROS packages.
- Enjoy! [If you reach here all by yourself, give yourself a treat!]
Regards,
Girish
PS: I had to end on a funny and slightly sarcastic note on step 7 because this whole process can take quite some time, actually a day or two!
Hi @ Sir Qirishkumar Kannan thanks a lot for so brief description.Sir i have already installed the ROS2 humble in my own PC on Ubuntu 22.04 and Gazebo 11.10.Now Sir can you help to provide some robot models(URDF) which can i simulate
Hi @nadeem ,
You can refer the following link on the course page to get the respective simulation files.
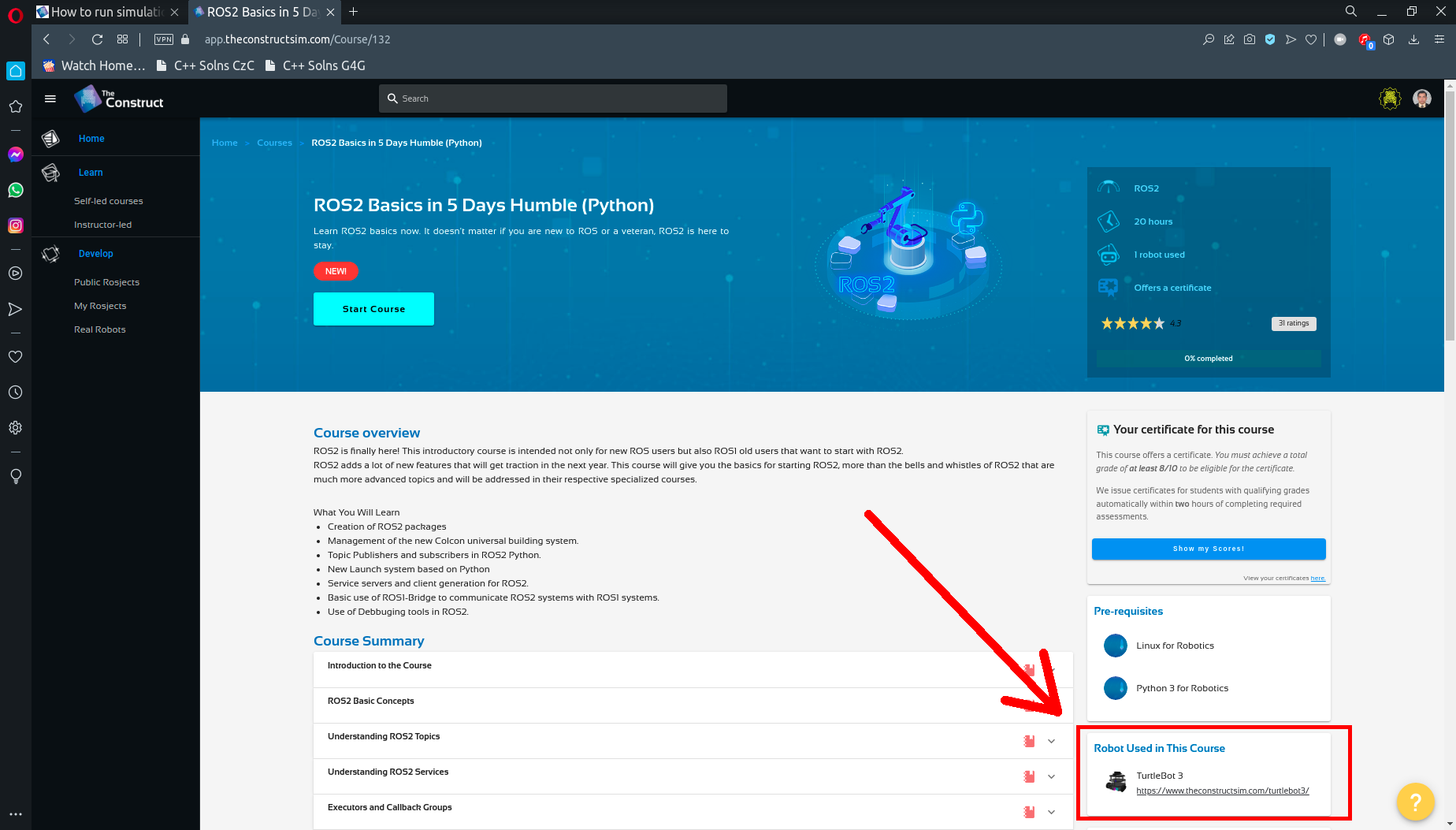
I hope this helps.
Regards,
Girish
Thanks Sir I will check
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.