Hi everyone, I’m practicing at 4. GPS - Navigation, in the Represent the MAP position in RVIZ uint, I want to get YOUR_ACCESS_TOKEN. I accessed this link ( https://www.mapbox.com/install/js/cdn-add/.) but I don’t know how to get YOUR_ACCESS_TOKEN. Can you help me?
Hello @nguyenphucvuongcdt ,
You need to create an account on Mapbox and sign in. Then you will be able to access your tokens area:


Hello @nguyenphucvuongcdt ,
You need to publish GPS data into a topic, and set this topic in the Topic field of the AerialMapDisplay display. See how I have set the topic /gps/fix:

Besides this, it also looks like you have other issues with your TFs (map frame warning).
You have to follow Unit 3 (and complete Exercise 3.1) to get the proper GPS data published.

Hello @nguyenphucvuongcdt ,
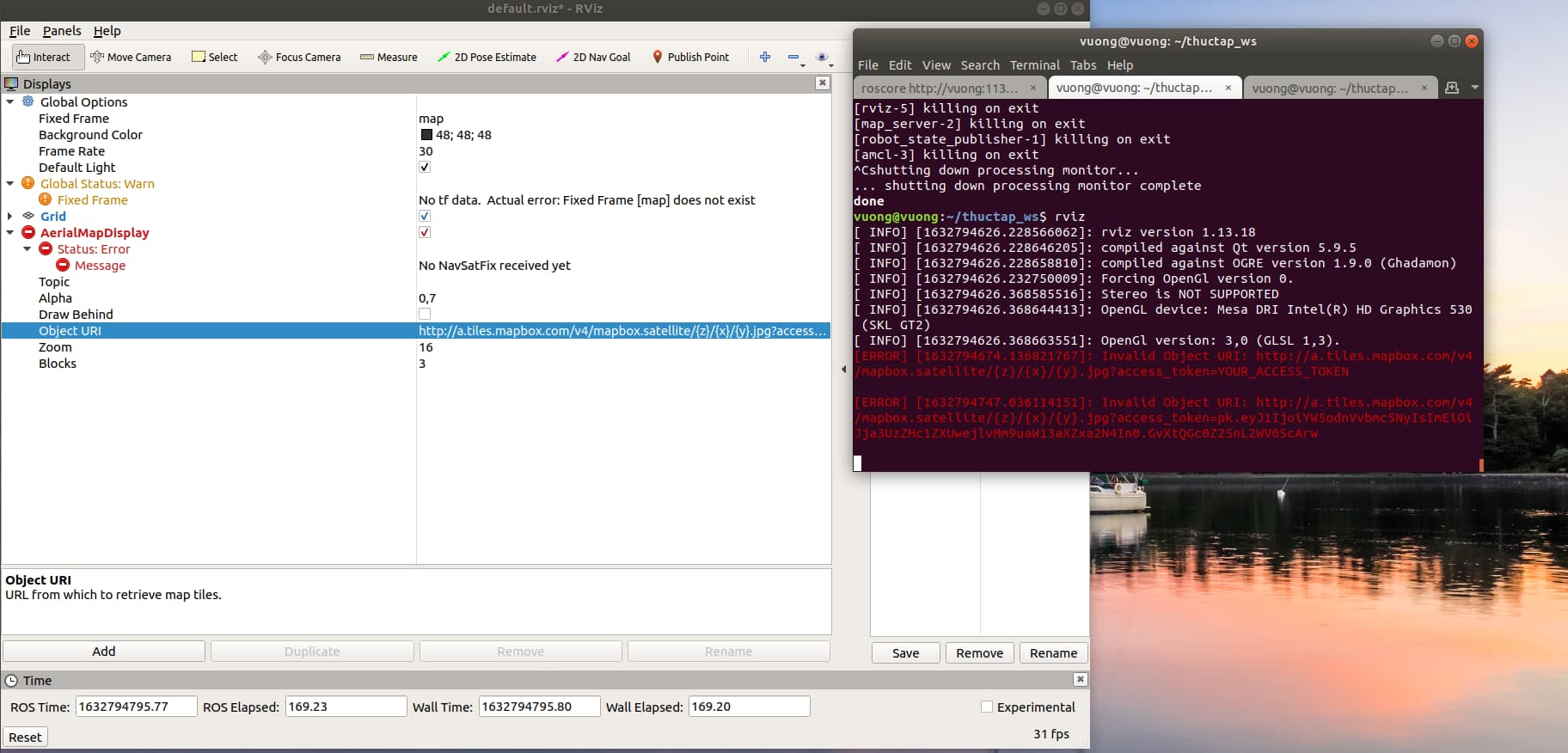
The RViz error you showed is saying that it’s not receiving any data. Do you have a topic named /gps/fix, and is GPS data being published into this topic?
thank @albertoezquerro , I have some questions: I use my computer to operate ROS system, if I have to connect Internet to get GPS data? Is my computer GPS receiver?
No, computers are not GPS receivers. You can get an external GPS receiver though and connect it easily to your computer through USB, for instance.
Can you suggest me some external GPS receivers which are supported in ROS?
Hello @nguyenphucvuongcdt ,
I can’t suggest any since I’ve never used one before. I would start by having a look at the ones listed here though: Sensors - ROS Wiki