Hi again!
I am finishing with the ros navigation course and got stuck with the local planner.
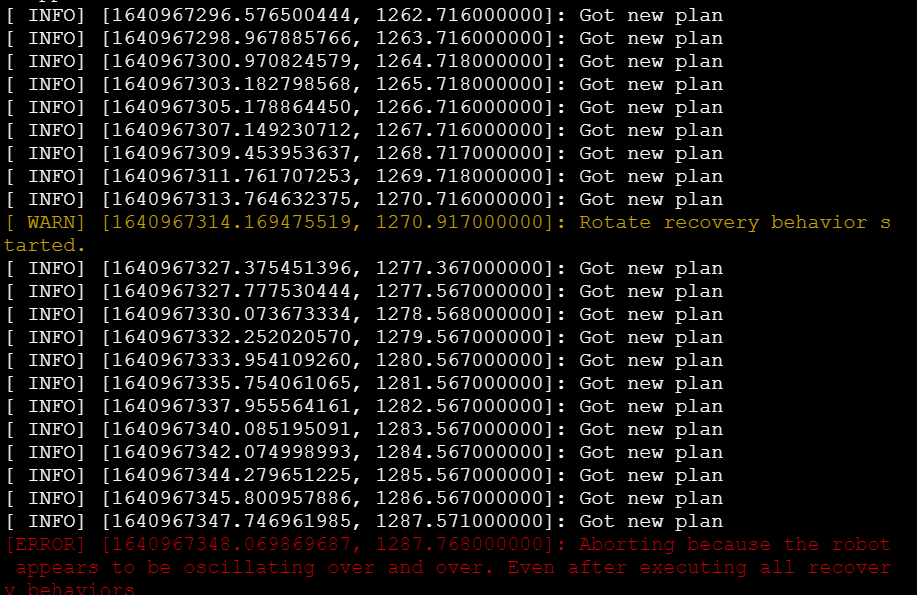
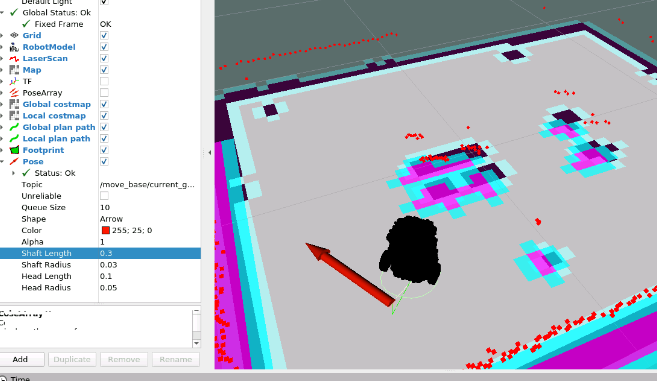
The robot moves towards the target pose as expected but when it is closer it stops moving and starts recalculating endlessly the local plan:
I tried changin the parameters values but still don’t make it work.
the parameters are:
SUMMARY
========
PARAMETERS
* /amcl/base_frame_id: base_link
* /amcl/global_frame_id: map
* /amcl/gui_publish_rate: 10.0
* /amcl/kld_err: 0.05
* /amcl/kld_z: 0.99
* /amcl/laser_lambda_short: 0.1
* /amcl/laser_likelihood_max_dist: 2.0
* /amcl/laser_max_beams: 60
* /amcl/laser_max_range: 12.0
* /amcl/laser_model_type: likelihood_field
* /amcl/laser_sigma_hit: 0.2
* /amcl/laser_z_hit: 0.5
* /amcl/laser_z_max: 0.05
* /amcl/laser_z_rand: 0.5
* /amcl/laser_z_short: 0.05
* /amcl/max_particles: 2000
* /amcl/min_particles: 500
* /amcl/odom_alpha1: 0.2
* /amcl/odom_alpha2: 0.2
* /amcl/odom_alpha3: 0.2
* /amcl/odom_alpha4: 0.2
* /amcl/odom_alpha5: 0.1
* /amcl/odom_frame_id: odom
* /amcl/odom_model_type: diff
* /amcl/recovery_alpha_fast: 0.0
* /amcl/recovery_alpha_slow: 0.0
* /amcl/resample_interval: 1
* /amcl/transform_tolerance: 1.0
* /amcl/update_min_a: 0.2
* /amcl/update_min_d: 0.25
* /amcl/use_map_topic: False
* /move_base/DWAPlannerROS/acc_lim_theta: 2.0
* /move_base/DWAPlannerROS/acc_lim_x: 1.0
* /move_base/DWAPlannerROS/acc_lim_y: 0.0
* /move_base/DWAPlannerROS/forward_point_distance: 0.325
* /move_base/DWAPlannerROS/global_frame_id: odom
* /move_base/DWAPlannerROS/goal_distance_bias: 80.0
* /move_base/DWAPlannerROS/holonomic_robot: False
* /move_base/DWAPlannerROS/max_scaling_factor: 0.2
* /move_base/DWAPlannerROS/max_vel_theta: 1.5
* /move_base/DWAPlannerROS/max_vel_trans: 0.3
* /move_base/DWAPlannerROS/max_vel_x: 0.32
* /move_base/DWAPlannerROS/max_vel_y: 0.0
* /move_base/DWAPlannerROS/min_vel_theta: 0.05
* /move_base/DWAPlannerROS/min_vel_trans: 0.0
* /move_base/DWAPlannerROS/min_vel_x: 0.0
* /move_base/DWAPlannerROS/min_vel_y: 0.0
* /move_base/DWAPlannerROS/occdist_scale: 0.01
* /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05
* /move_base/DWAPlannerROS/path_distance_bias: 80.0
* /move_base/DWAPlannerROS/publish_cost_grid_pc: True
* /move_base/DWAPlannerROS/publish_traj_pc: True
* /move_base/DWAPlannerROS/scaling_speed: 0.25
* /move_base/DWAPlannerROS/sim_time: 3
* /move_base/DWAPlannerROS/stop_time_buffer: 0.2
* /move_base/DWAPlannerROS/theta_stopped_vel: 0.0
* /move_base/DWAPlannerROS/vtheta_samples: 20
* /move_base/DWAPlannerROS/vx_samples: 5
* /move_base/DWAPlannerROS/vy_samples: 1
* /move_base/DWAPlannerROS/xy_goal_tolerance: 0.2
* /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.1
* /move_base/NavfnROS/allow_unknown: False
* /move_base/NavfnROS/default_tolerance: 0.0
* /move_base/NavfnROS/planner_window_x: 0.0
* /move_base/NavfnROS/planner_window_y: 0.0
* /move_base/NavfnROS/visualize_potential: False
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/base_local_planner: dwa_local_planner...
* /move_base/controller_frequency: 5.0
* /move_base/controller_patience: 15.0
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/inflation_layer/enabled: True
* /move_base/global_costmap/inflation_layer/inflation_radius: 0.01
* /move_base/global_costmap/max_obstacle_height: 0.6
* /move_base/global_costmap/obstacle_layer/observation_sources: scan
* /move_base/global_costmap/obstacle_layer/scan/clearing: True
* /move_base/global_costmap/obstacle_layer/scan/data_type: LaserScan
* /move_base/global_costmap/obstacle_layer/scan/marking: True
* /move_base/global_costmap/obstacle_layer/scan/max_obstacle_height: 0.4
* /move_base/global_costmap/obstacle_layer/scan/min_obstacle_height: 0
* /move_base/global_costmap/obstacle_layer/scan/topic: /scan
* /move_base/global_costmap/obstacle_range: 2.5
* /move_base/global_costmap/plugins: [{'name': 'static...
* /move_base/global_costmap/publish_frequency: 3.0
* /move_base/global_costmap/raytrace_range: 3.0
* /move_base/global_costmap/resolution: 0.05
* /move_base/global_costmap/robot_base_frame: base_link
* /move_base/global_costmap/static_layer/enabled: True
* /move_base/global_costmap/static_layer/map_topic: /map
* /move_base/global_costmap/static_layer/subscribe_to_updates: True
* /move_base/global_costmap/transform_tolerance: 0.5
* /move_base/global_costmap/update_frequency: 5.0
* /move_base/local_costmap/global_frame: odom
* /move_base/local_costmap/height: 1.5
* /move_base/local_costmap/inflation_layer/enabled: True
* /move_base/local_costmap/inflation_layer/inflation_radius: 0.01
* /move_base/local_costmap/max_obstacle_height: 0.6
* /move_base/local_costmap/obstacle_layer/observation_sources: scan
* /move_base/local_costmap/obstacle_layer/scan/clearing: True
* /move_base/local_costmap/obstacle_layer/scan/data_type: LaserScan
* /move_base/local_costmap/obstacle_layer/scan/marking: True
* /move_base/local_costmap/obstacle_layer/scan/max_obstacle_height: 0.4
* /move_base/local_costmap/obstacle_layer/scan/min_obstacle_height: 0
* /move_base/local_costmap/obstacle_layer/scan/topic: /scan
* /move_base/local_costmap/obstacle_range: 2.5
* /move_base/local_costmap/plugins: [{'name': 'obstac...
* /move_base/local_costmap/publish_frequency: 2.0
* /move_base/local_costmap/raytrace_range: 3.0
* /move_base/local_costmap/resolution: 0.05
* /move_base/local_costmap/robot_base_frame: base_link
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_layer/enabled: True
* /move_base/local_costmap/static_layer/map_topic: /map
* /move_base/local_costmap/static_layer/subscribe_to_updates: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 5.0
* /move_base/local_costmap/width: 1.5
* /move_base/oscillation_distance: 0.2
* /move_base/oscillation_timeout: 10.0
* /move_base/planner_frequency: 1
* /move_base/planner_patience: 5.0
* /rosdistro: noetic
* /rosversion: 1.15.11
NODES
/
amcl (amcl/amcl)
map_server (map_server/map_server)
move_base (move_base/move_base
)
Thank you!