Hello Everyone,
I build kinematic chain for motion planning in RViz with the help of moveit assistant. chain motion planning is executed successfully without any error. now, I need to get perticular link position as it represented in below image:
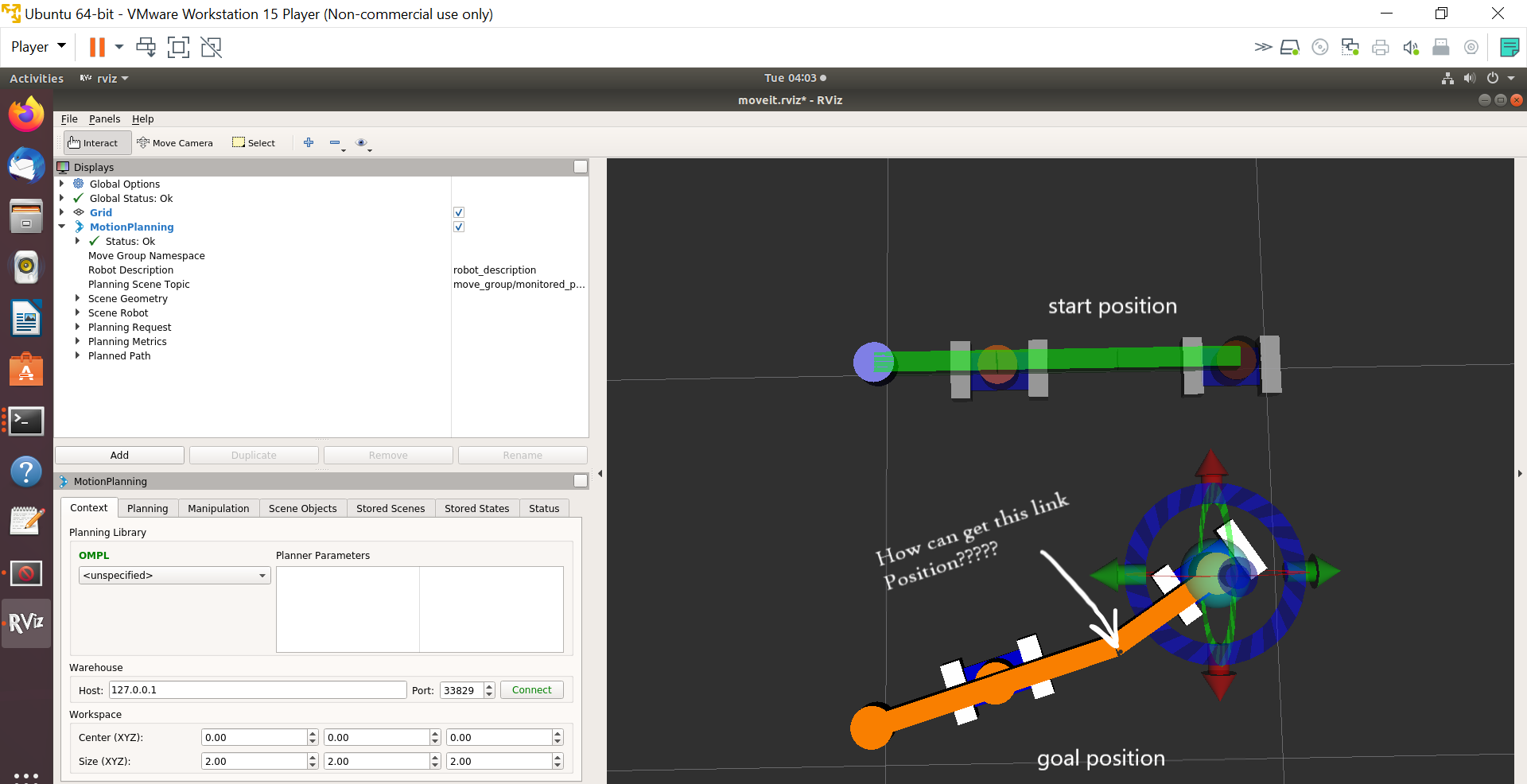
any assistant would be appreciate.