I am not sure if it is bug , but i thought will report it here
This error goes away when i restart the simulation, the script works first time .shows the same error when try to execute it a second time . is there another elegant way to keep executing the python script ?
Hello @vasank1958,
Which script are you trying to execute? There should be no problem to execute an script twice. By the way, the Manipulation Course has been updated, especially the MoveIT Chapters and also the Grasping one.
Best,
sir the script where end effector pose goal is given using moveit commander .
Hello @vasank1958,
Please make sure that your end effector is properly configured in the MoveIt Setup Assistant. You can have a look at this ROSject (http://www.rosject.io/l/10332d1c/) where the full Fetch MoveIt configuration is explained.
Best,
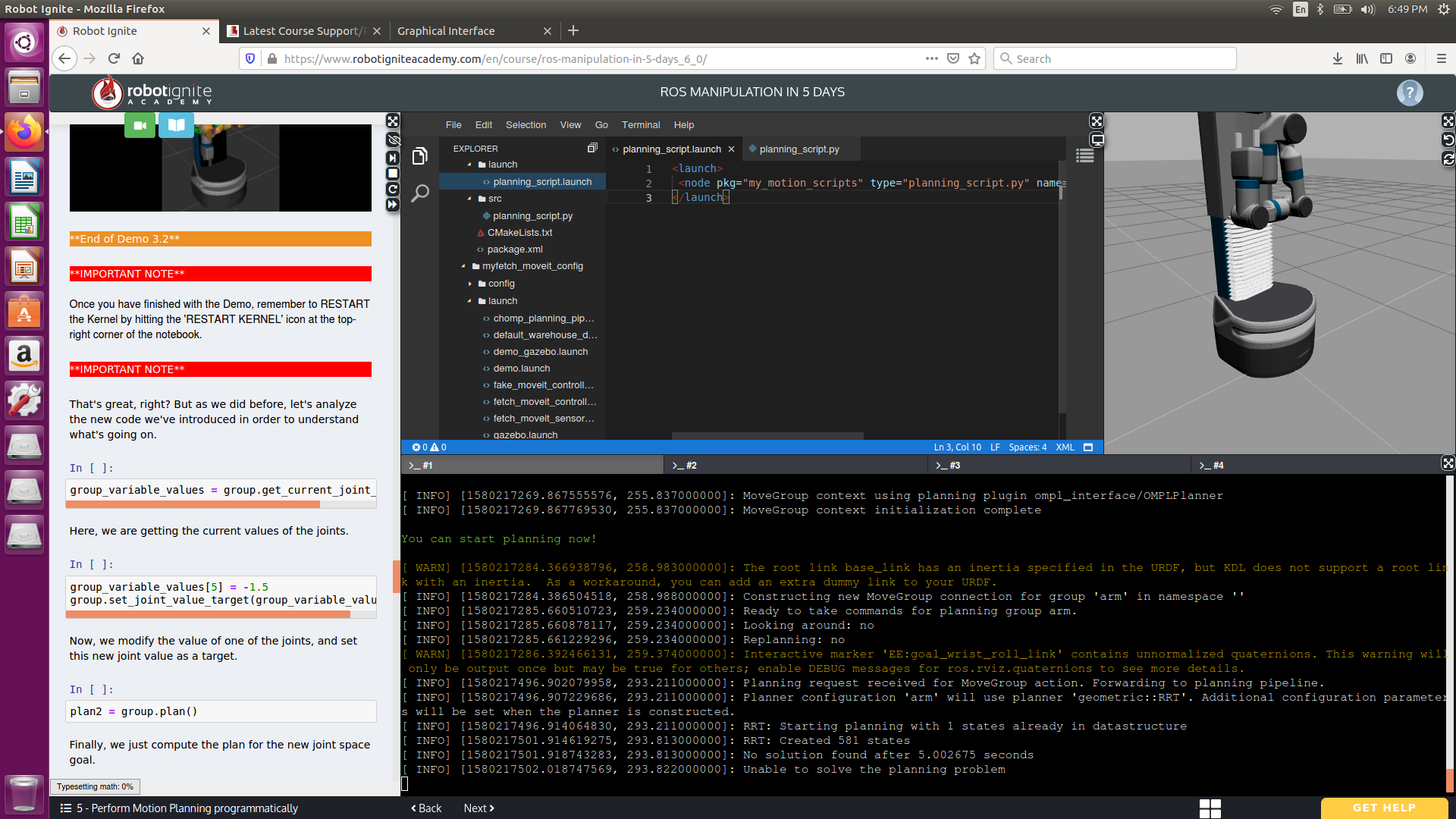
@albertoezquerro i found the reason for the errors , move it can’t plan path for all pose values x,y,z i am assuming it depends upon the robot work place . are there anyway to find viable values of x,y,z ?
I get the same error if i change quaternions , infact none of the orientation argument for end effort pose is accepted by move it .
Are there any elegant way to plan motion trajectory ?