Run…
roslaunch simple_grasping_2475 basic_perception_dbg_2475.launch
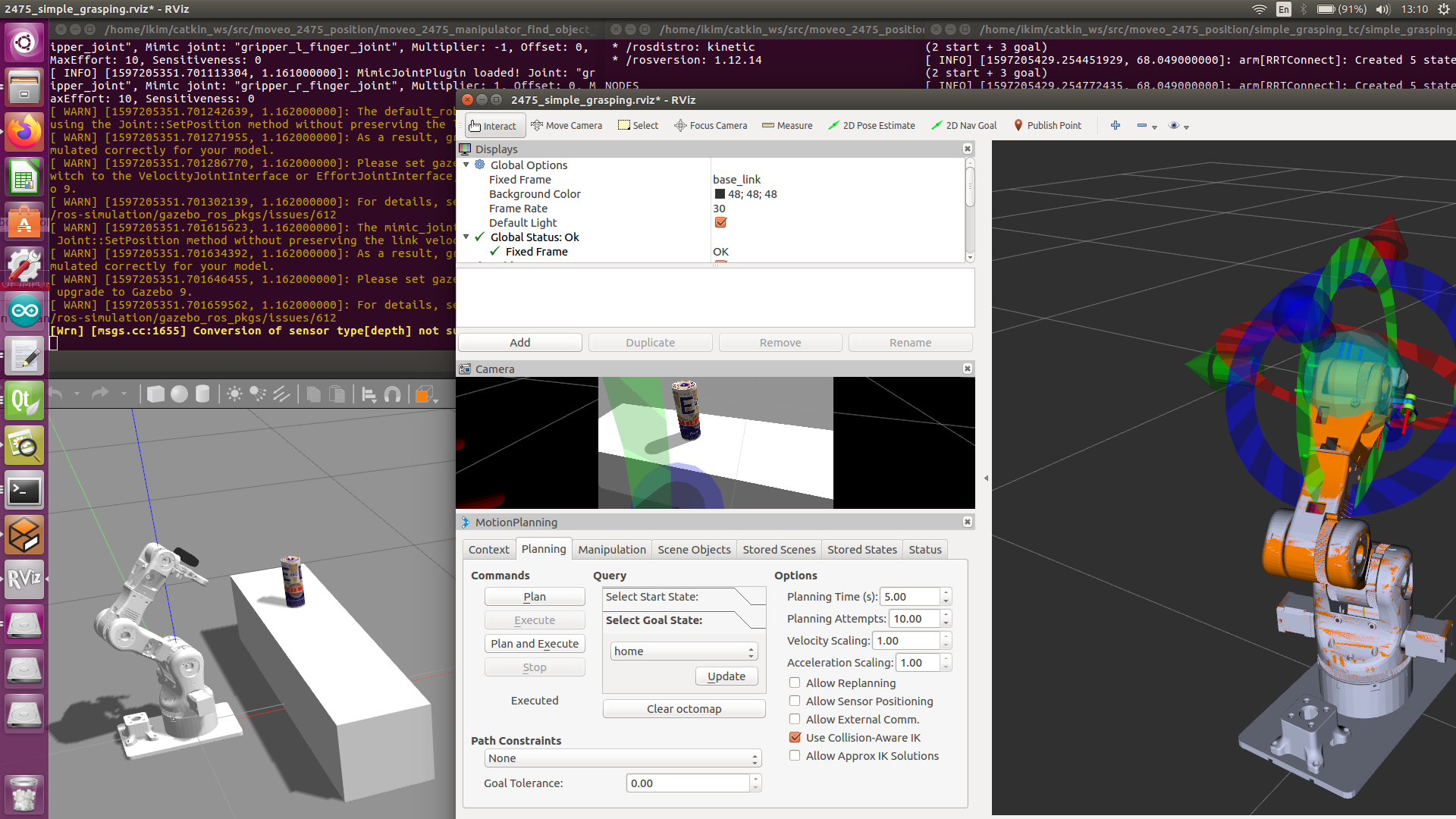
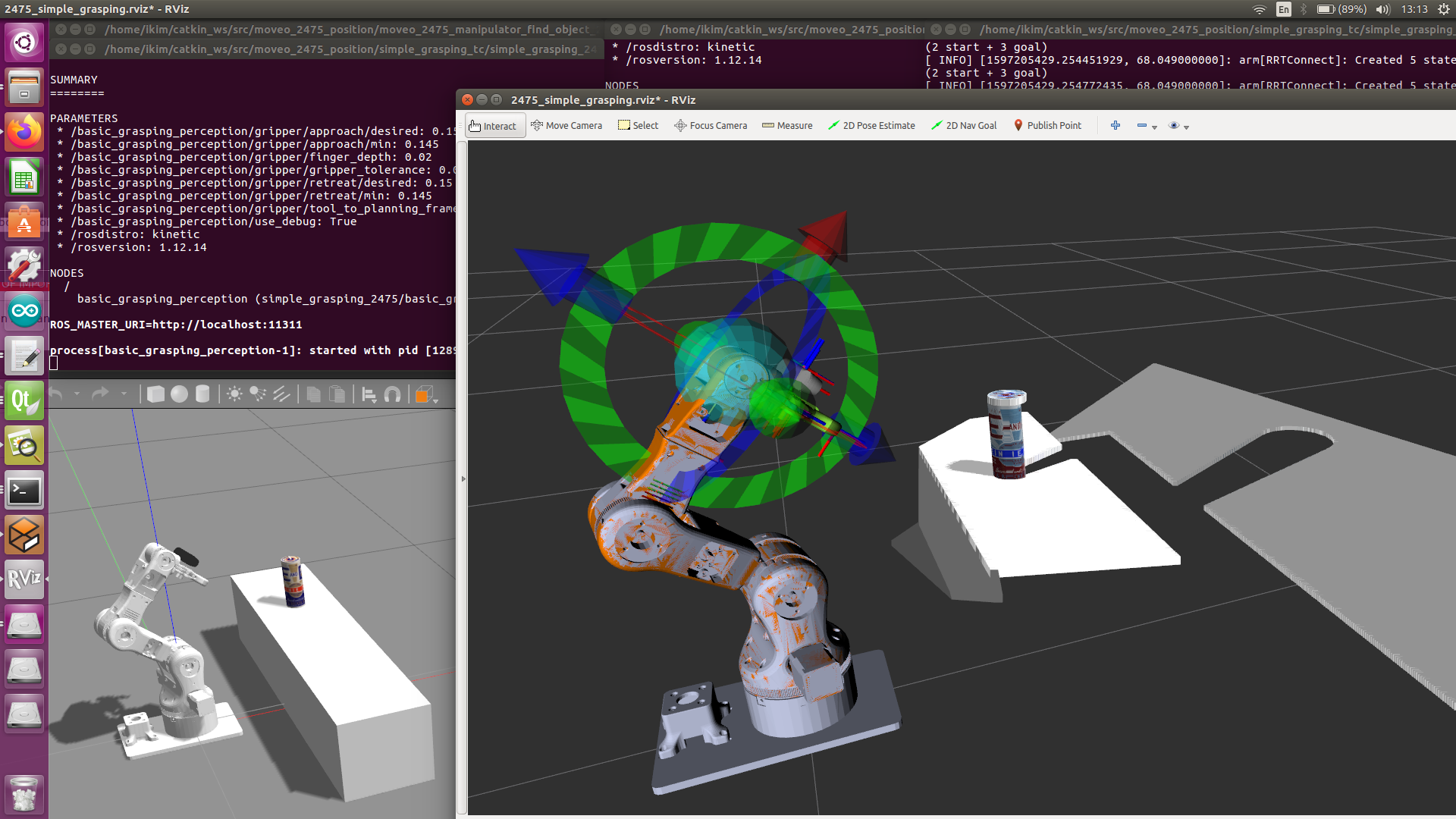
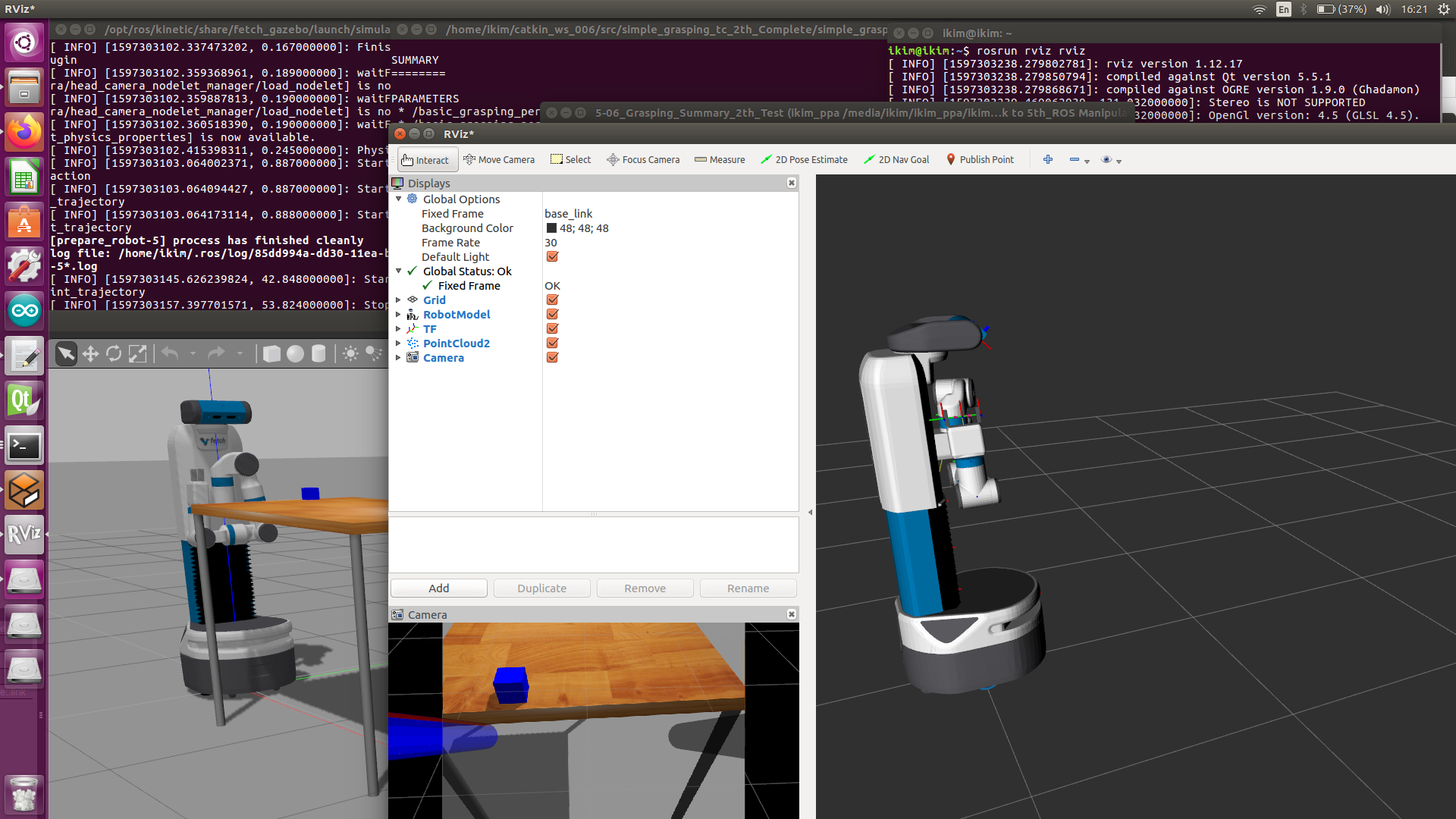
#gazebo & Rviz Running…2475
-----------------------------------------------goal
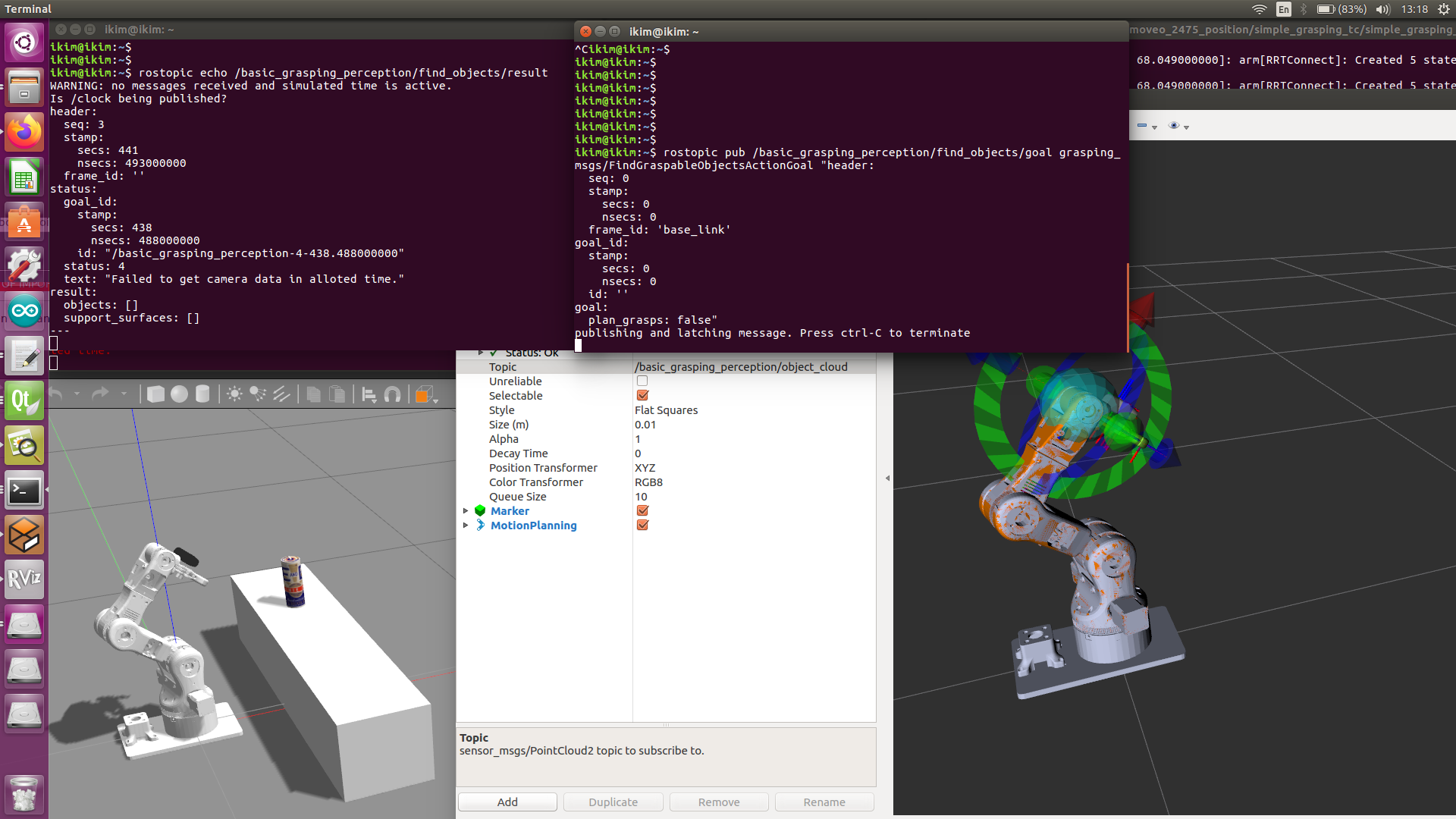
rostopic echo /basic_grasping_perception/find_objects/result
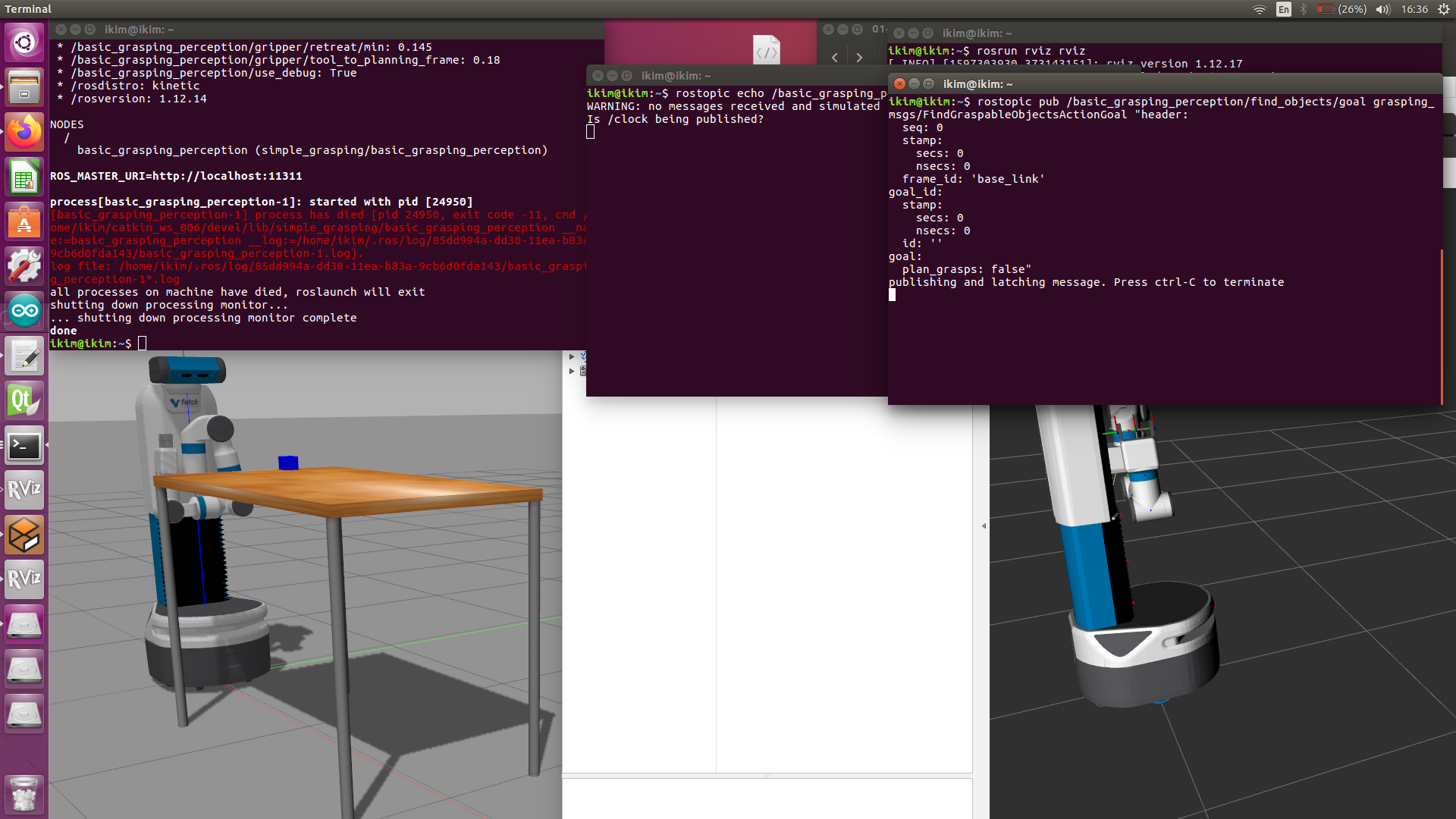
rostopic pub /basic_grasping_perception/find_objects/goal grasping_msgs/FindGraspableObjectsActionGoal “header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ‘base_link’
goal_id:
stamp:
secs: 0
nsecs: 0
id: ‘’
goal:
plan_grasps: false”
------------------------------------------> 1th_per_Test_Result:
camera: d435i
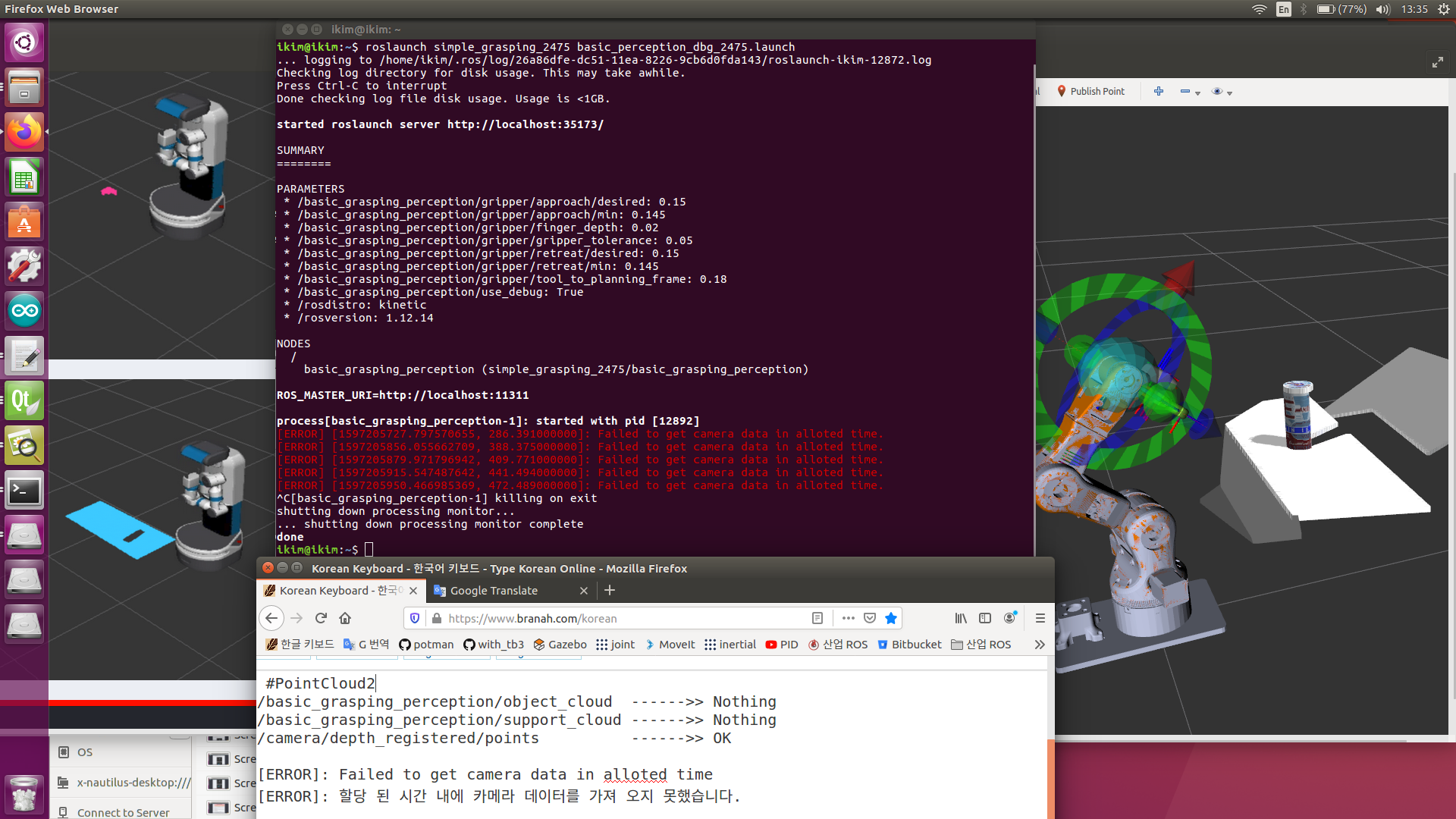
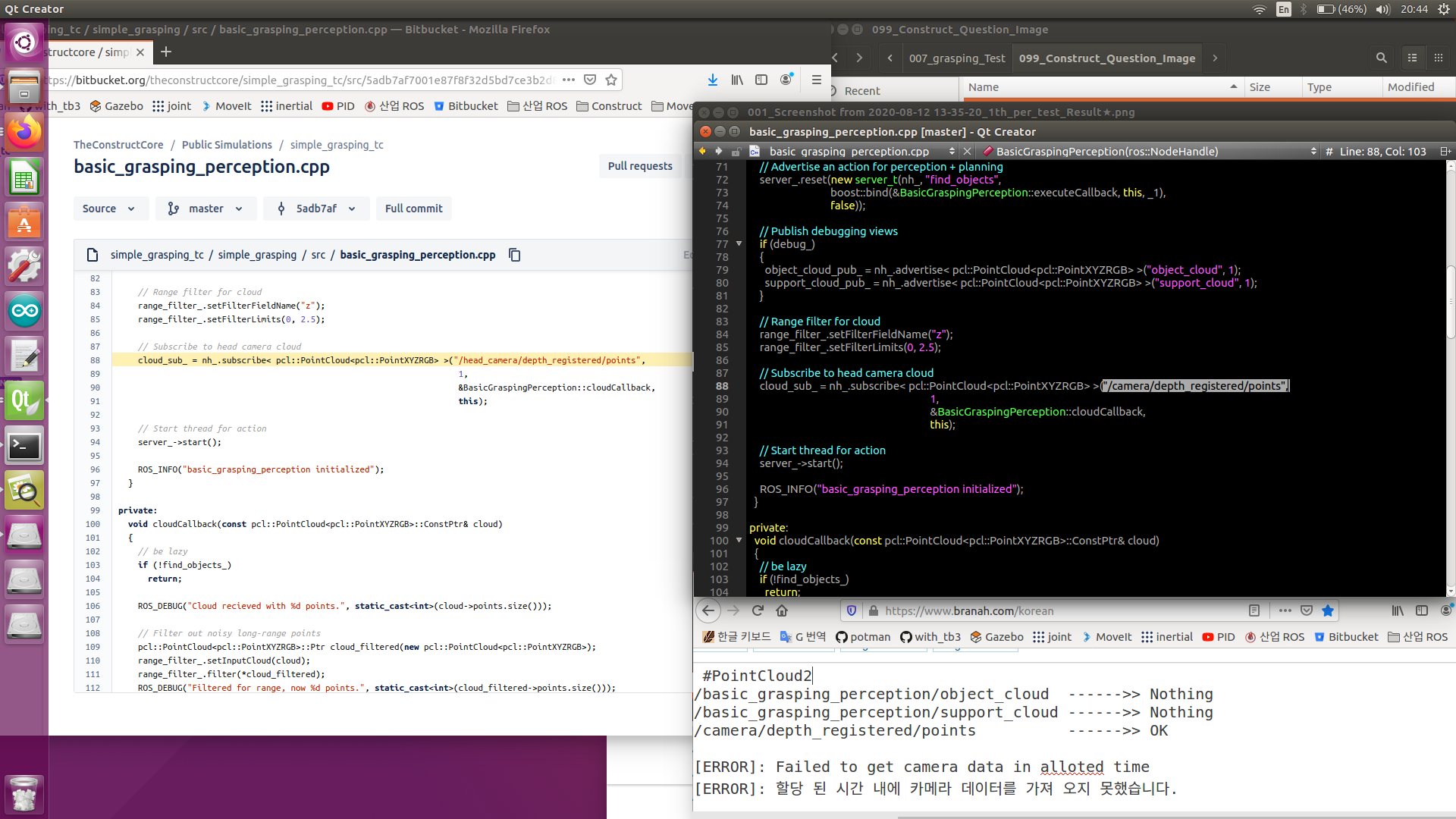
#PointCloud2…5th,6th image
/basic_grasping_perception/object_cloud ------>> Nothing★
/basic_grasping_perception/support_cloud ------>> Nothing★
/camera/depth_registered/points ------>> OK
[ERROR]: Failed to get camera data in alloted time★★★ <<------------------
Thank you.
P.S: Object detection (TF) verified using “Find-Object”…7th image
Hello @mdc1020,
So the problem is that it doesn’t get the camera data? In that case, probably you’d need to change the topic name in perception node (and recompile), here: https://bitbucket.org/theconstructcore/simple_grasping_tc/src/5adb7af7001e87f8f32d5bd7ce3b2d8311856c2d/simple_grasping/src/basic_grasping_perception.cpp#lines-88
Best,
Thank you for answer
Modify Camera Topic >> object/support Detection Not …My Robot 2475 <1,2th image>
So I installed fetch on my pc…Ubuntu 16/kinetic
http://docs.fetchrobotics.com/gazebo.html#installation
$ sudo apt-get update
$ sudo apt-get install ros-$ROS_DISTRO-fetch-gazebo-demo
…bitbucket PKG…Not gazebo Exe
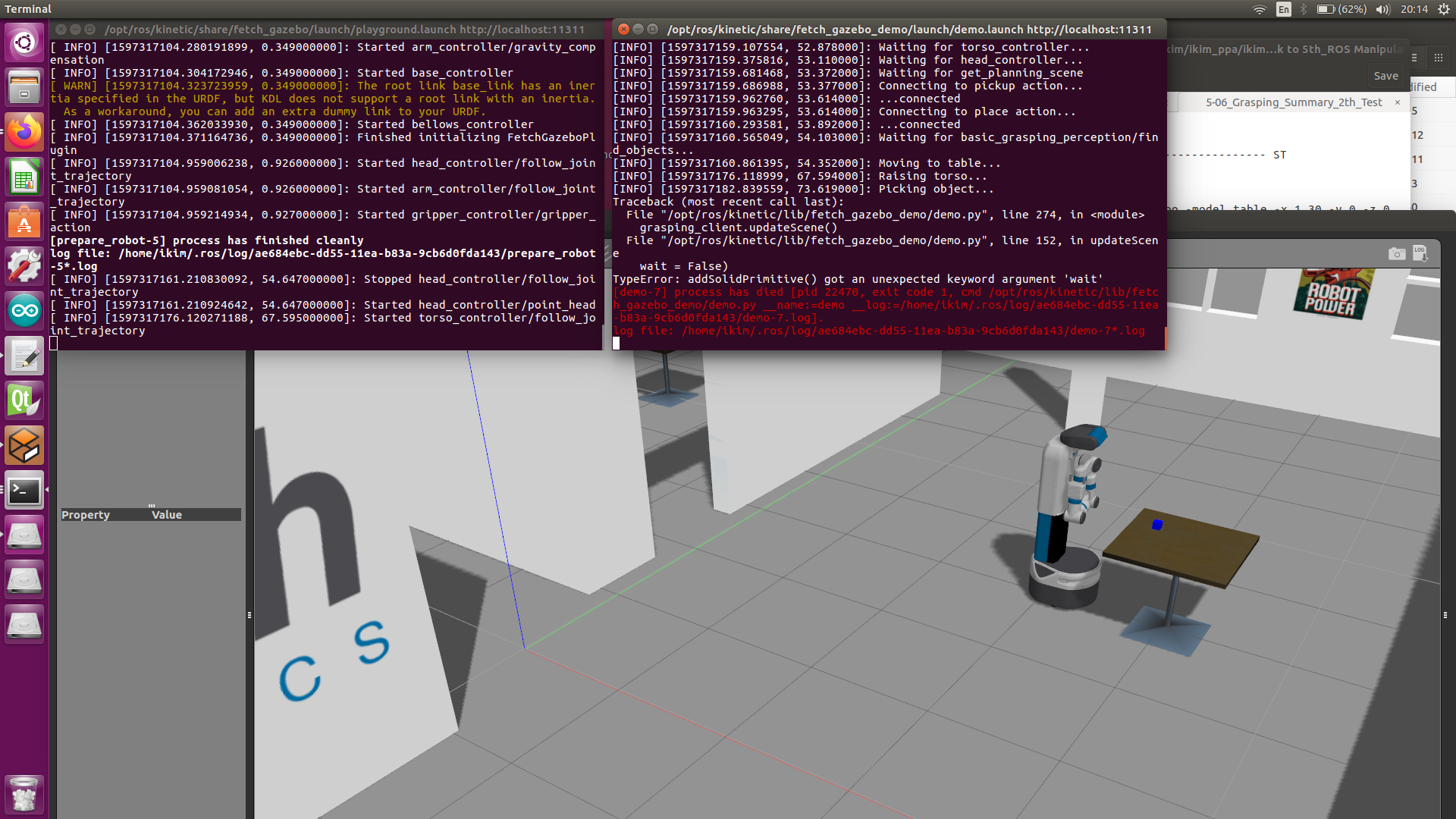
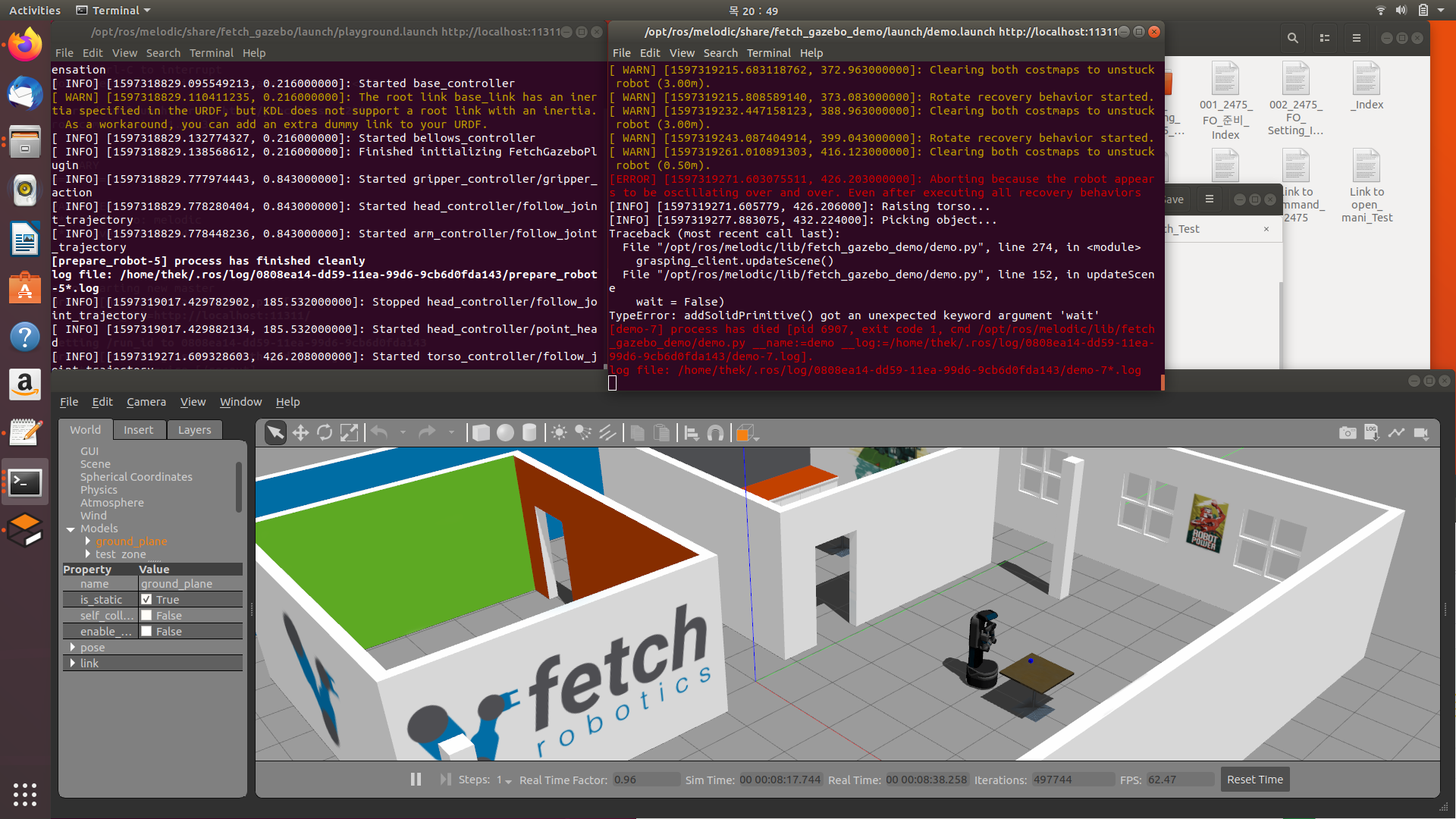
#Problem…fetch
- goal command >> perception Node Kill / 3th image
- integrated: <navi,per,MoveIt,pick> ----> pick object Error (U16,U18:melodic testED)
So…Tiago: I plan to study
“pick and place” Not Easy…HaHaHa
Hello @mdc1020,
This is the problem with local setups… When things don’t work as expected, it’s very hard for us to try to help, since every single person has a different setup which can influence the results in a different way. If you feel so, you could try to put everything into a ROSject so that we can try to help you better.
Best,
I had the same issue (in ROS2 manipulation w/moveit exercise). I didn’t dig enough to find a root cause, but found out extending the time before simple_grasping aborts the action call (from 3 secs to 7 secs on the Robot Ignite) has been effective for me.
I made simple_grasping configurable 130s/simple_grasping!1 (specifically this commit for the very issue in question).