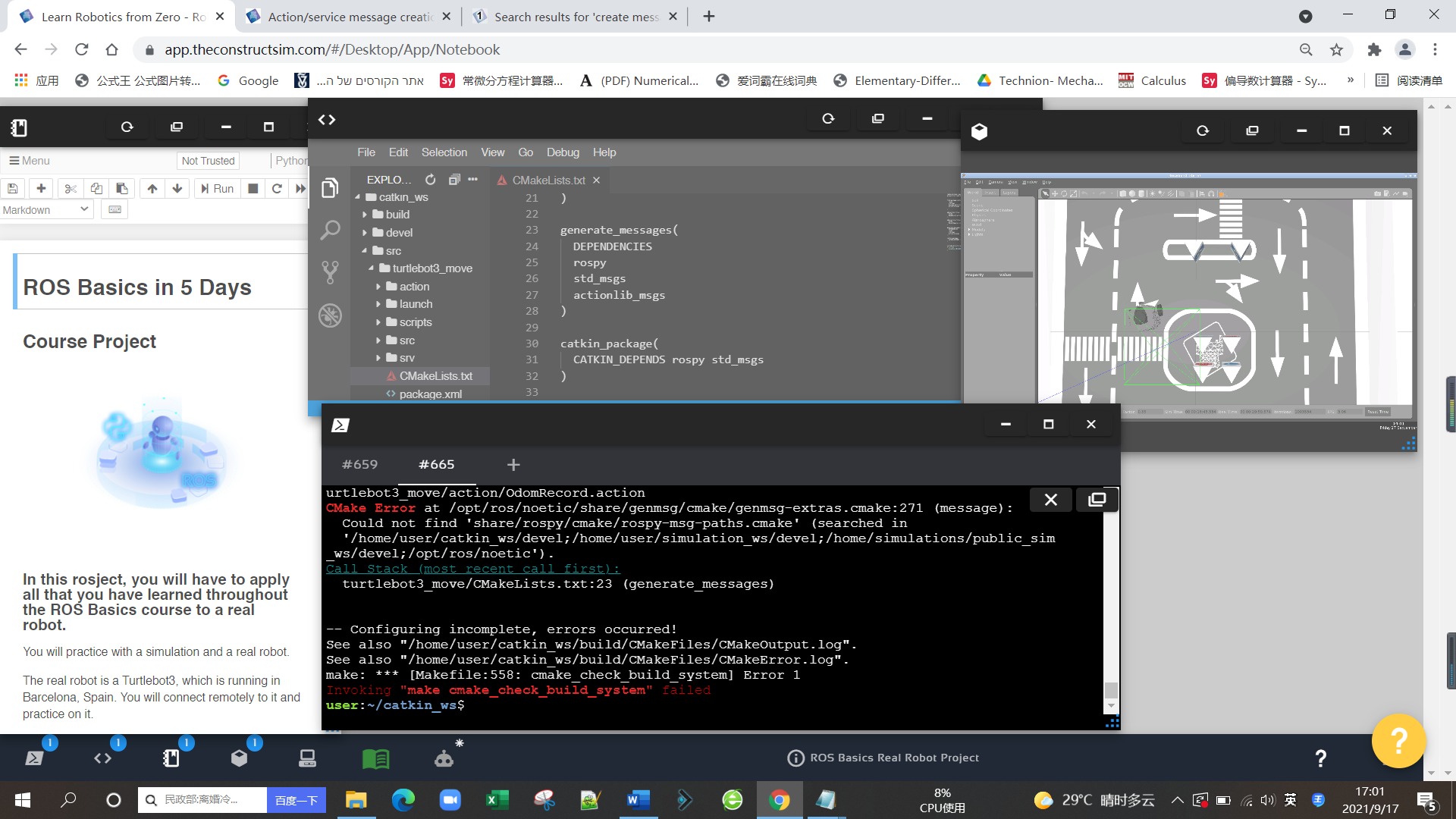
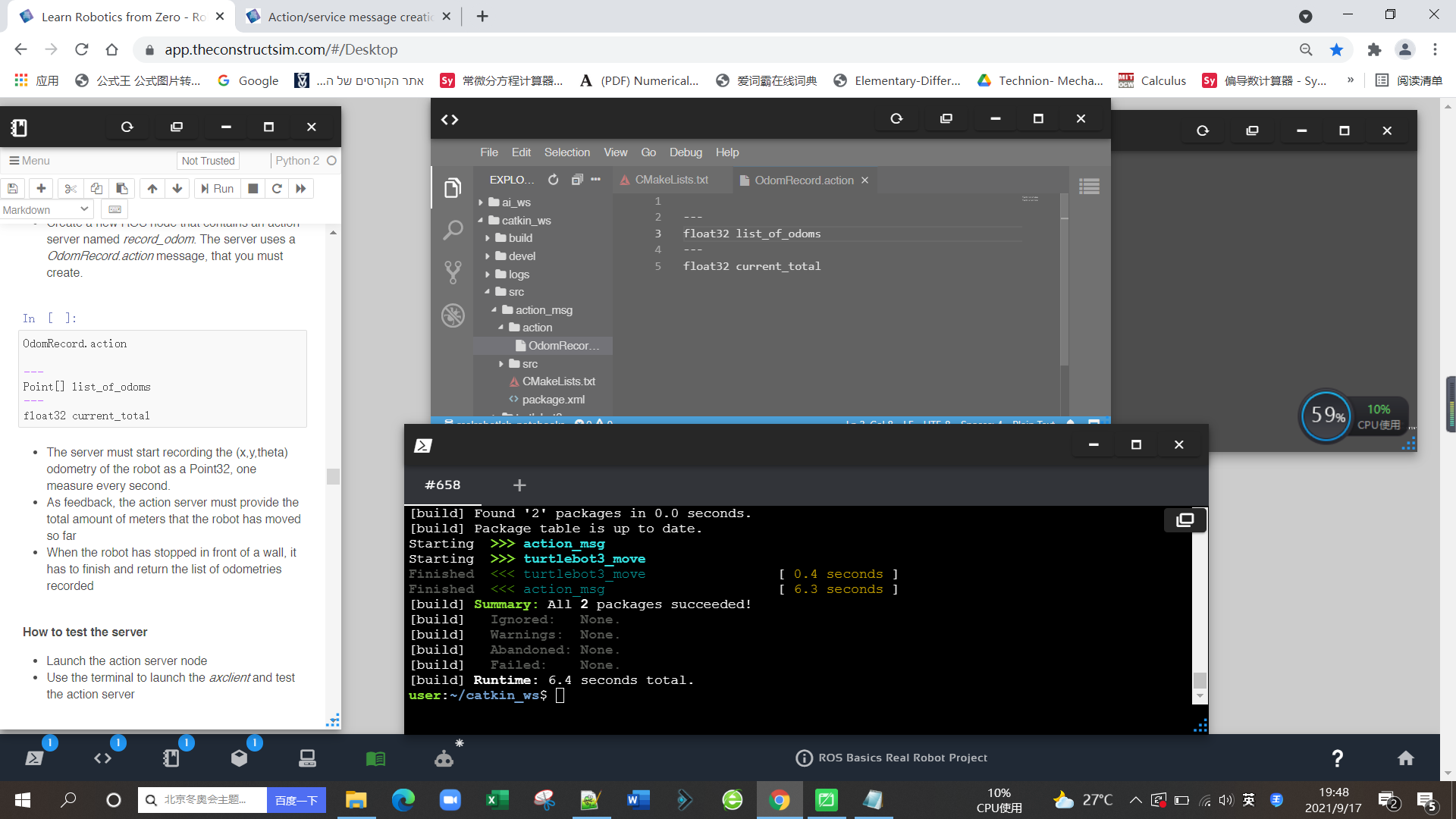
I’m working on Part III of rosproj of the course, and i was asked to create a new action msg first. I’ve already successfully created my service msg in the previous part, and here i’m attempting to create the action msg in the same pkg, and modify my Cmake.txt&pkg.xml file.
However, the result of build_make showed error occurs, and it seems there’s something wrong in line23 of my CMake file.
Hi, have you tried rebuilding your whole catkin_ws ? I mean: deleting /build and /devel, then doing a catkin_build in ~/catkin_ws.
Otherwise, if it happens in line 23, check you are not missing any brackets before in your FILES declaration as well. I’ll keep thinking about something in the meantime.
my pkg failed again, and it’s the same error
I think there isn’t a double file,and i didn’t operate any file before.
Maybe i’ll try to create my action msg in another pkg…
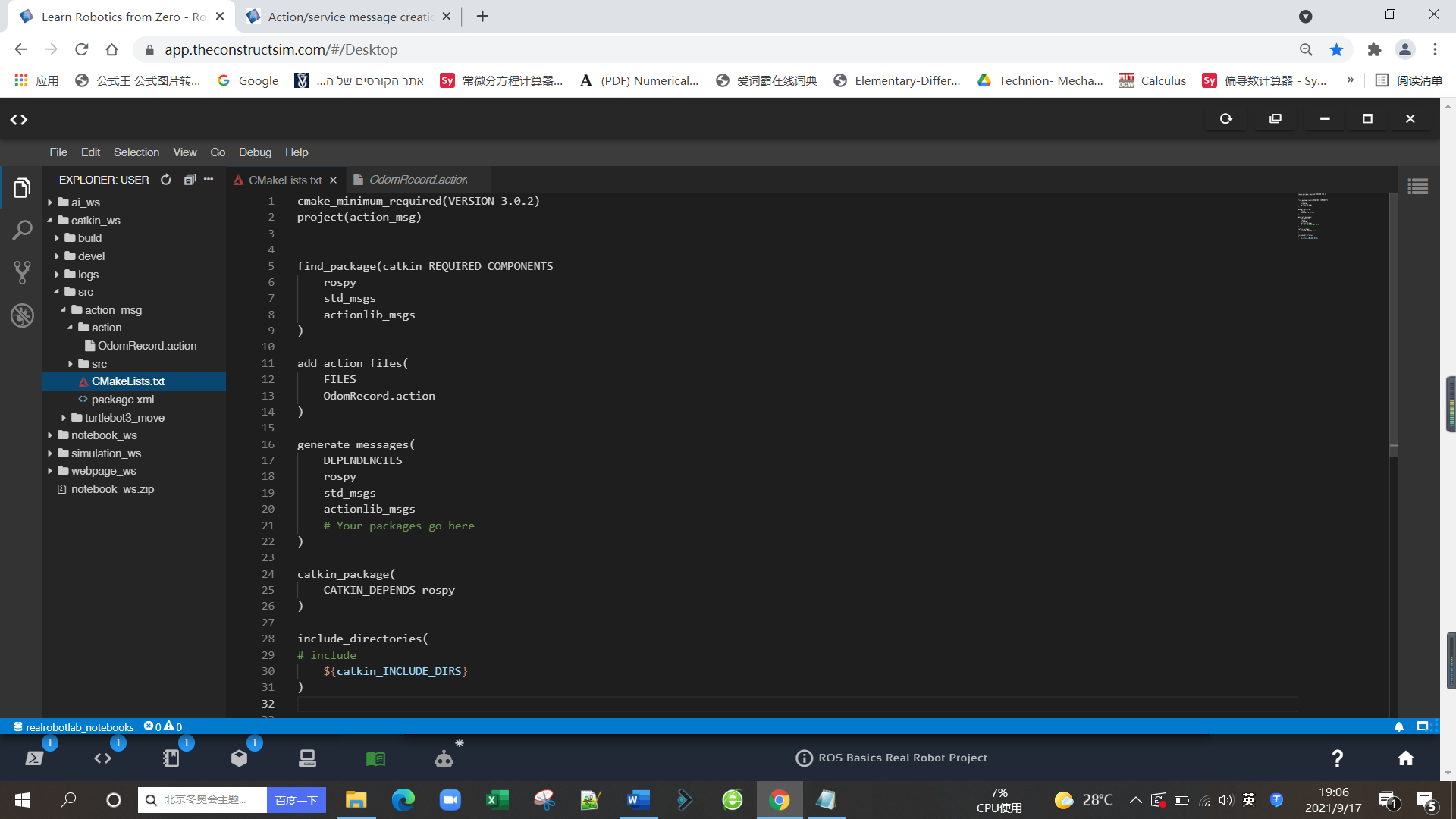
Ok, I hope that’s it: check your “generate_messages” part, you added rospy there, however, it should not be there because rospy is not a message generator unlike std_msgs for example.
It is probably not exactly explained properly. However, if someone can explain in more detail, it would be great.
I do not know if that is positive or not, but that is definitly a changement haha
Also in “find_package”, remove rospy and retry. I think it is because rospy is still declared in this scope, so then it tries to find it in generate_messages as well (my guess)
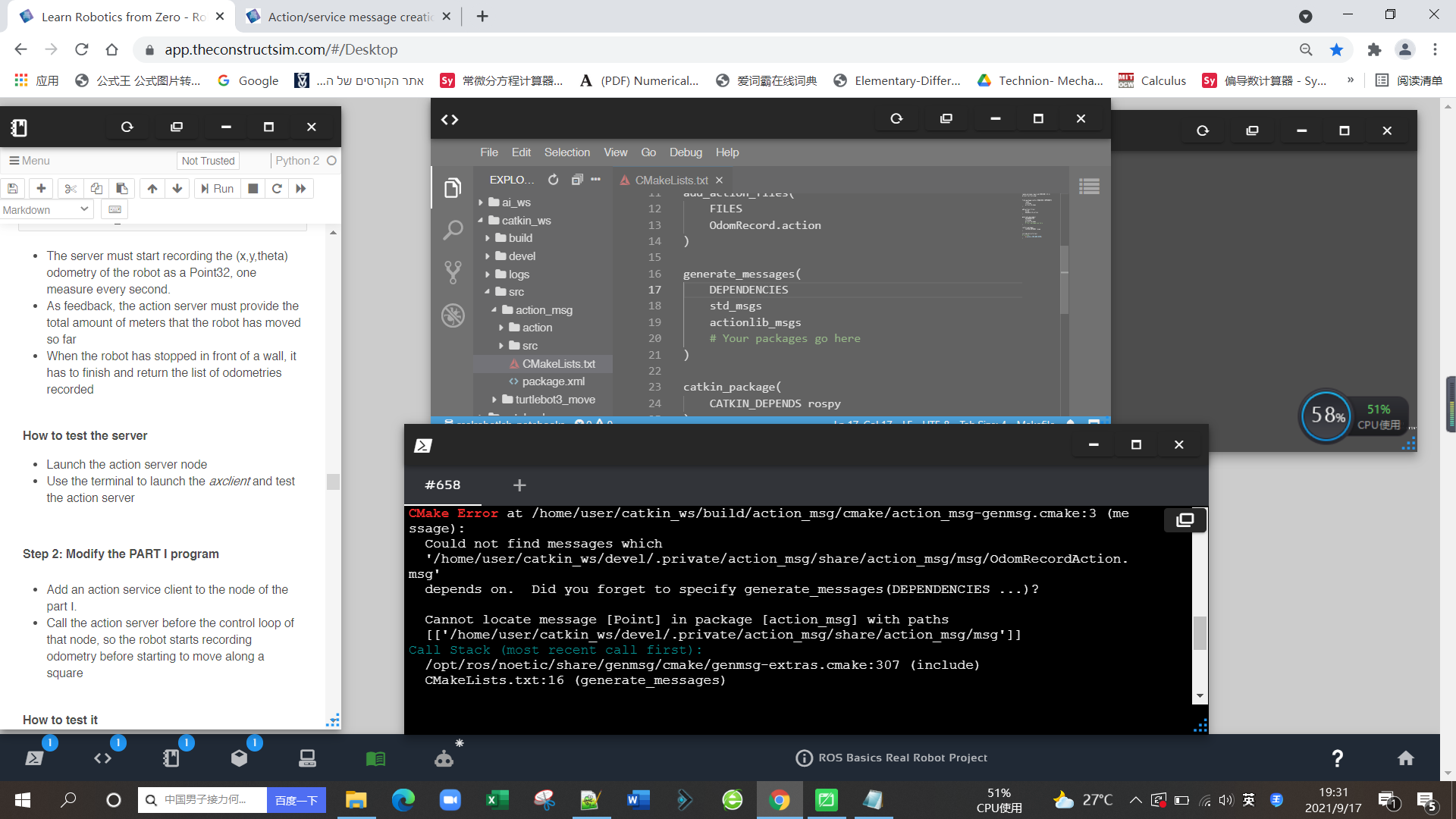
Does your action message only depends of std_msgs ?
Because if you also retrieve data from the Odometry, it might await from you to specify the “nav_msgs.msg” in “generate_messages”
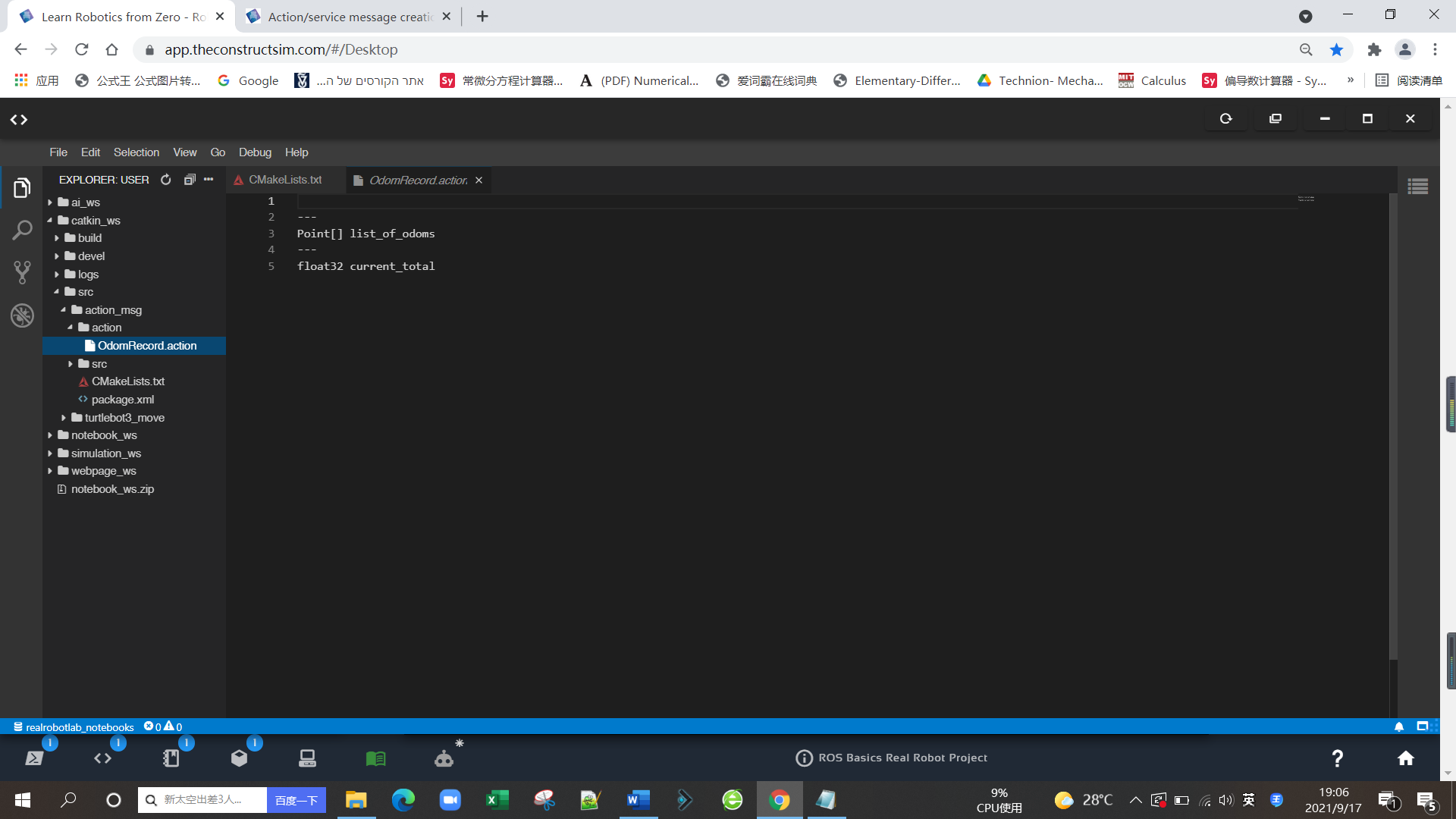
it works if i change my action msg type.
But the msg’s simply pasted from the question, as u ca see in the notebook in left screen,i don’t understand why it doesn’t work, or is Point a correct type
Hi, it finally succeeds!!
i add nav_msgs in both generate_message and find_package. Also, i changed Point to geometry_msgs/Point32.
Truly appreciate your help, thanks a million!


 It was a bit tedious haha
It was a bit tedious haha