The image below is taken from the answer for Action server pt2 in ROS Basics in 5 Days CPP course.
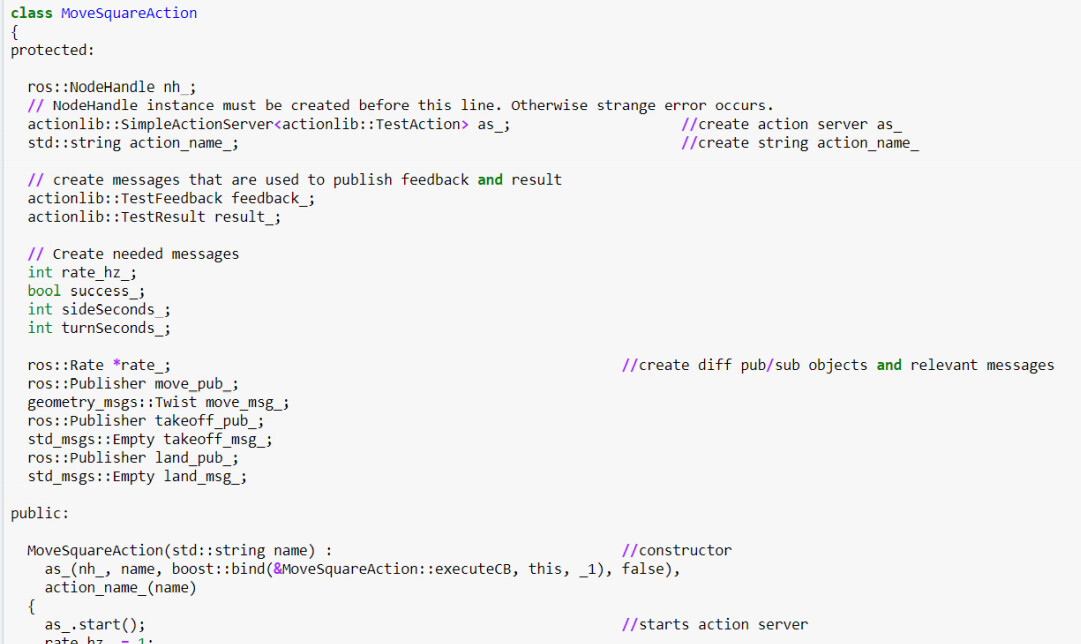
My question is: what is the use of “action_name_”? It is first declared as an std::string class within protected, and then passed as an argument in the constructor within public. What is going on, and how is this “action_name_” string taking the argument “name” in the constructor? Is this c++ syntax?
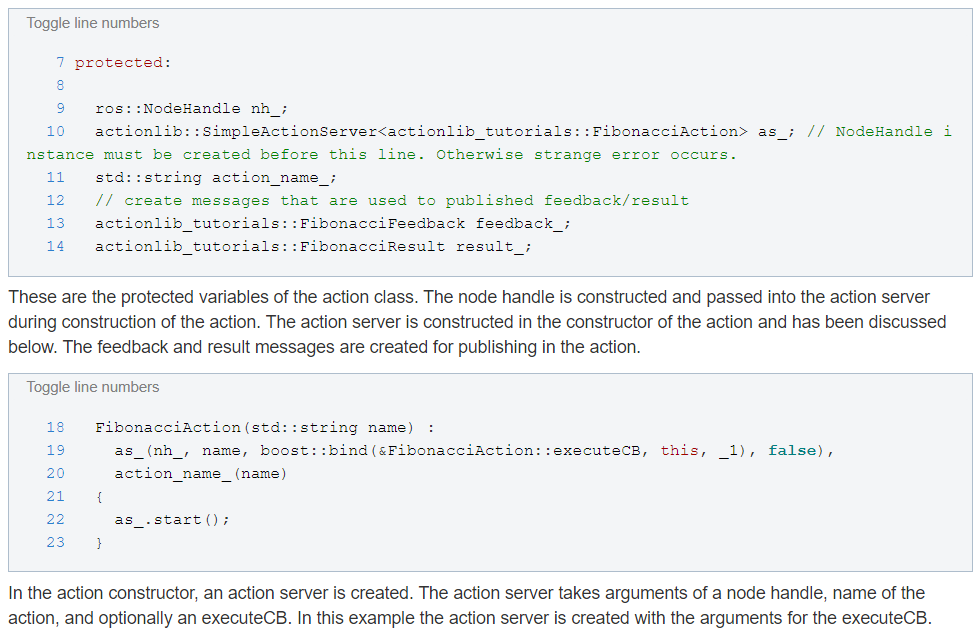
Sorry for the barrage of questions, i’m quite confused as the ROS wiki seems to show the same syntax(using “action_name_” as well), but doesn’t explain in depth what’s going on, as shown:
Would be great if someone can clear this doubt. Thanks!