This is my error:
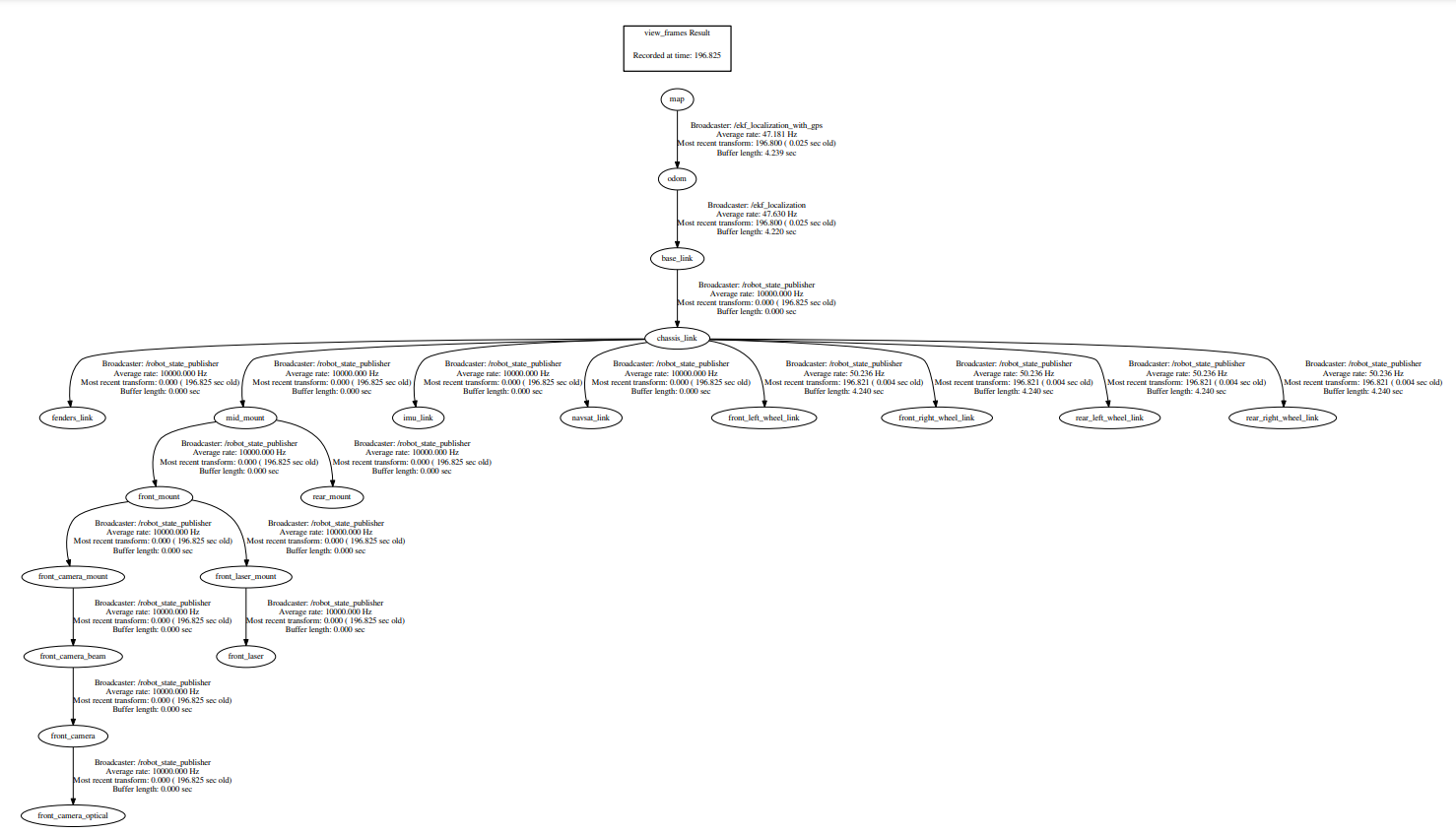
[ WARN] [1620917720.483753935, 100.788000000]: Timed out waiting for transform from base_link to odom to become available before running costmap, tf error: Could not find a connection between ‘odom’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 100.788 timeout was 0.1.
but if i do a rosrun tf view_frames, it seems they are connected? can you help me solve this?
I’ll get our experts to look into the warning but unless this is blocking your progress, I would say you should move on in the meantime.
Hello @badmadafaka ,
In what unit/exercise are you having this issue?
I think it is gone now. Perhaps you fixed it? But it happened when i launch all the files completed until the exercise where you use real gps images.
best
There is, however, an error in your view_robot.launch file I assume:
I think the folder has to be my_jackal_tools. But if I use my_jackal tools, and the rviz folder i created with the code you provided, then rviz doesnt show anything. But if I keep jackal_tools it works, but it takes me somewhere else than the folder I created for the purpose.
Best