how to connect in this rosject ?gazebo simul freezes and teleop keyboard sends above msg
Hello @jacques.florin ,
The notebook was created based on the previous version of ROSDS, but you still can launch it using the terminals:
user:~$ roslaunch curiosity_mars_rover_description main_simple.launch
Could you try like this and let me know if that works for you?
Regards
I try like this as from the beginning of the project test
I get Gazebo windows with curiosity only and lot of anomalies are listed in terminal
I tried with : export QT_X11_NO_MITSHM=1 ==> gazebo windows are then complete
world, insert,layers and all the stuff become available same for camera view
BUT teleop twist keyboard remains freezed with :
“Waiting for subscriber to connect to /cmd_vel” msg
thanks
Hi @jacques.florin ,
These warning messages are normal, because some of the model descriptions are not following all the requirements gazebo requests for this kind of file, but it does not prevent the simulation to work properly.
About teleop, this is the expected result. For me the simulation and teleop works fine.
Have you changed the workspace configuration or even simulation files?
Could you check if your ROS_PACKAGE_PATH is correct?
This is the default value
/home/user/catkin_ws/src:/home/user/simulation_ws/src:/home/simulations/public_sim_ws/src:/opt/ros/kinetic/share
In the worst cases, you can remove the rosject and fork it again the original rosject from here
or using the share link: Learn Robotics from Zero - Robotics & ROS Online Courses
It is the first one in the list.
Regards
projects have been deleted then forked again
env var ROS_PACKAGE_PATH is OK
Gazebo simu only works with env var QT_X11_NO_MITSHM=1 positioned before roslaunch main_simple.launch
I think the problem is due to missing teleop_twist_keyboard.py file in
teleop_twist_keyboard pkg ( /opt/ros/kinetic/share :) thats comes with the forking
can you check this point ?
thanks
Hi Jacques,
can you share your rosject link with me so I can see what may be happenning?
Also, for any error reporting, you need to paste here all the information: which command you launched, the full error message, the image of the Gazebo window,… everything to understand what is happening
Hi @rtellez and @marco.nc.arruda ,
I have been having the exact same problem, here is my rosject although I have not modified it at all from the original.
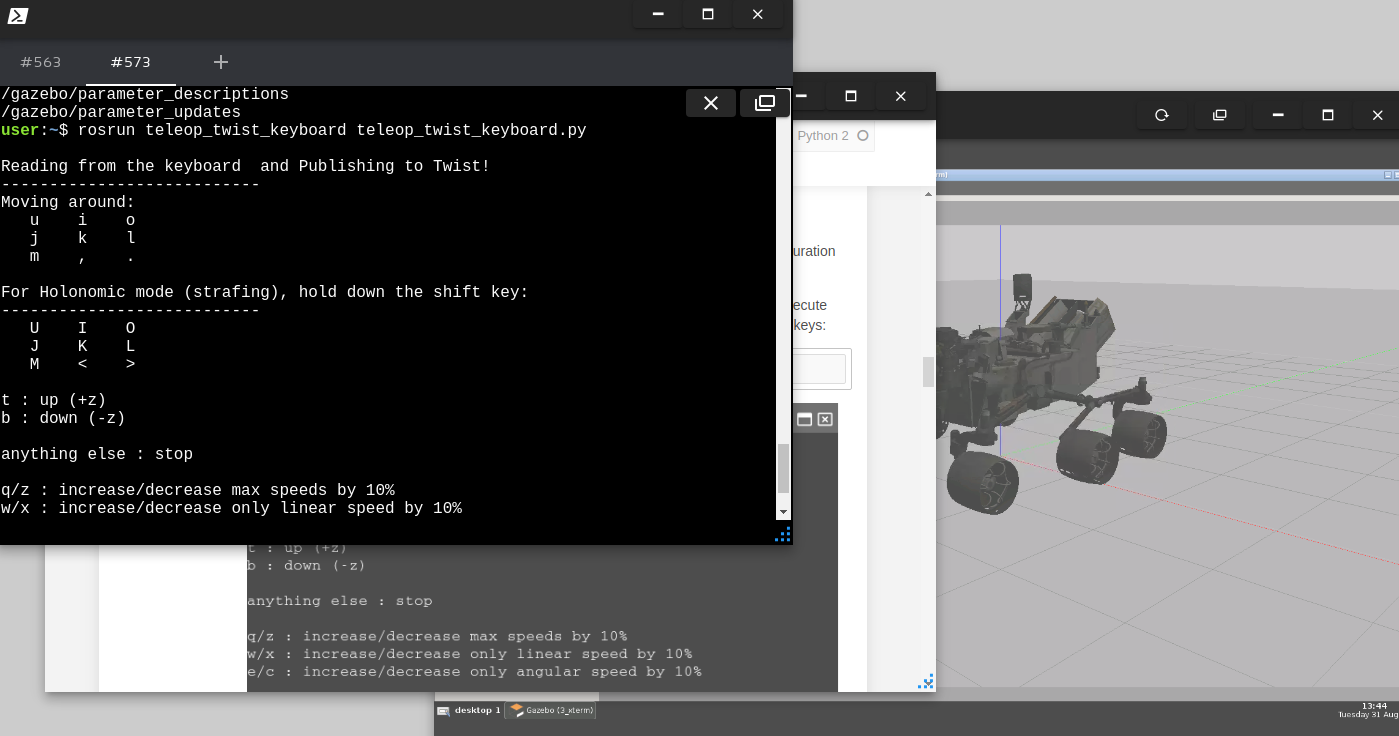
I have the same issue as @jacques.florin, after I launch the main_simple.launch file in the
curiosity_mars_rover_description package, I try to run teleop_twist_keyboard.py but /cmd_vel is not being subscribed to. Here is my output for reference :

And this is my output for rostopic list :
user:~$ rostopic list
/clicked_point
/clock
/cmd_vel
/curiosity_mars_rover/arm_01_joint_position_controller/command
/curiosity_mars_rover/arm_01_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/arm_01_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/arm_01_joint_position_controller/state
/curiosity_mars_rover/arm_02_joint_position_controller/command
/curiosity_mars_rover/arm_02_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/arm_02_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/arm_02_joint_position_controller/state
/curiosity_mars_rover/arm_03_joint_position_controller/command
/curiosity_mars_rover/arm_03_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/arm_03_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/arm_03_joint_position_controller/state
/curiosity_mars_rover/arm_04_joint_position_controller/command
/curiosity_mars_rover/arm_04_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/arm_04_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/arm_04_joint_position_controller/state
/curiosity_mars_rover/arm_tools_joint_position_controller/command
/curiosity_mars_rover/arm_tools_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/arm_tools_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/arm_tools_joint_position_controller/state
/curiosity_mars_rover/back_wheel_L_joint_velocity_controller/command
/curiosity_mars_rover/back_wheel_L_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/back_wheel_L_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/back_wheel_L_joint_velocity_controller/state
/curiosity_mars_rover/back_wheel_R_joint_velocity_controller/command
/curiosity_mars_rover/back_wheel_R_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/back_wheel_R_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/back_wheel_R_joint_velocity_controller/state
/curiosity_mars_rover/front_wheel_L_joint_velocity_controller/command
/curiosity_mars_rover/front_wheel_L_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/front_wheel_L_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/front_wheel_L_joint_velocity_controller/state
/curiosity_mars_rover/front_wheel_R_joint_velocity_controller/command
/curiosity_mars_rover/front_wheel_R_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/front_wheel_R_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/front_wheel_R_joint_velocity_controller/state
/curiosity_mars_rover/joint_states
/curiosity_mars_rover/mast_02_joint_position_controller/command
/curiosity_mars_rover/mast_02_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/mast_02_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/mast_02_joint_position_controller/state
/curiosity_mars_rover/mast_cameras_joint_position_controller/command
/curiosity_mars_rover/mast_cameras_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/mast_cameras_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/mast_cameras_joint_position_controller/state
/curiosity_mars_rover/mast_p_joint_position_controller/command
/curiosity_mars_rover/mast_p_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/mast_p_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/mast_p_joint_position_controller/state
/curiosity_mars_rover/middle_wheel_L_joint_velocity_controller/command
/curiosity_mars_rover/middle_wheel_L_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/middle_wheel_L_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/middle_wheel_L_joint_velocity_controller/state
/curiosity_mars_rover/middle_wheel_R_joint_velocity_controller/command
/curiosity_mars_rover/middle_wheel_R_joint_velocity_controller/pid/parameter_descriptions
/curiosity_mars_rover/middle_wheel_R_joint_velocity_controller/pid/parameter_updates
/curiosity_mars_rover/middle_wheel_R_joint_velocity_controller/state
/curiosity_mars_rover/odom
/curiosity_mars_rover/suspension_arm_B2_L_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_B2_L_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_B2_L_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_B2_L_joint_position_controller/state
/curiosity_mars_rover/suspension_arm_B2_R_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_B2_R_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_B2_R_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_B2_R_joint_position_controller/state
/curiosity_mars_rover/suspension_arm_B_L_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_B_L_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_B_L_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_B_L_joint_position_controller/state
/curiosity_mars_rover/suspension_arm_B_R_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_B_R_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_B_R_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_B_R_joint_position_controller/state
/curiosity_mars_rover/suspension_arm_F_L_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_F_L_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_F_L_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_F_L_joint_position_controller/state
/curiosity_mars_rover/suspension_arm_F_R_joint_position_controller/command
/curiosity_mars_rover/suspension_arm_F_R_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_arm_F_R_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_arm_F_R_joint_position_controller/state
/curiosity_mars_rover/suspension_steer_B_L_joint_position_controller/command
/curiosity_mars_rover/suspension_steer_B_L_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_steer_B_L_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_steer_B_L_joint_position_controller/state
/curiosity_mars_rover/suspension_steer_B_R_joint_position_controller/command
/curiosity_mars_rover/suspension_steer_B_R_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_steer_B_R_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_steer_B_R_joint_position_controller/state
/curiosity_mars_rover/suspension_steer_F_L_joint_position_controller/command
/curiosity_mars_rover/suspension_steer_F_L_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_steer_F_L_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_steer_F_L_joint_position_controller/state
/curiosity_mars_rover/suspension_steer_F_R_joint_position_controller/command
/curiosity_mars_rover/suspension_steer_F_R_joint_position_controller/pid/parameter_descriptions
/curiosity_mars_rover/suspension_steer_F_R_joint_position_controller/pid/parameter_updates
/curiosity_mars_rover/suspension_steer_F_R_joint_position_controller/state
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/gazebo_gui/parameter_descriptions
/gazebo_gui/parameter_updates
/initialpose
/mira/camera1/camera_info
/mira/camera1/image_raw
/mira/camera1/image_raw/compressed
/mira/camera1/image_raw/compressed/parameter_descriptions
/mira/camera1/image_raw/compressed/parameter_updates
/mira/camera1/image_raw/compressedDepth
/mira/camera1/image_raw/compressedDepth/parameter_descriptions
/mira/camera1/image_raw/compressedDepth/parameter_updates
/mira/camera1/image_raw/theora
/mira/camera1/image_raw/theora/parameter_descriptions
/mira/camera1/image_raw/theora/parameter_updates
/mira/camera1/parameter_descriptions
/mira/camera1/parameter_updates
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static