I am trying to do the project given in end of TF course, the source code is given at bitbucket site too,
problem is the model in gazebo donot move from rqt_gui, rostopic list doesnot show the controllers name
although the .yaml file is included…
if someone did this unit kindly help how the humanoid robot will move in gazebo simulation
thanks
Hi,
Let me have a look at the simulation
I have checked and if you launch the controllers correctly , it should move any joint that is actuated. Here you have a small video showing that:
Please check that you launched the correct script and launches and configured correctly.
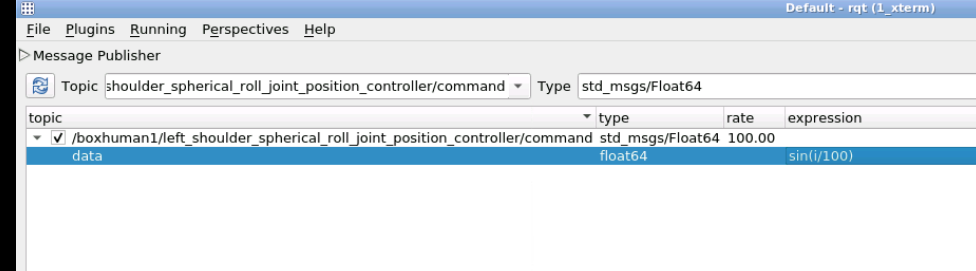
The RQT GUi has to have this configuration:
ok thank you…its working with me too now slight_smile:
1 Like