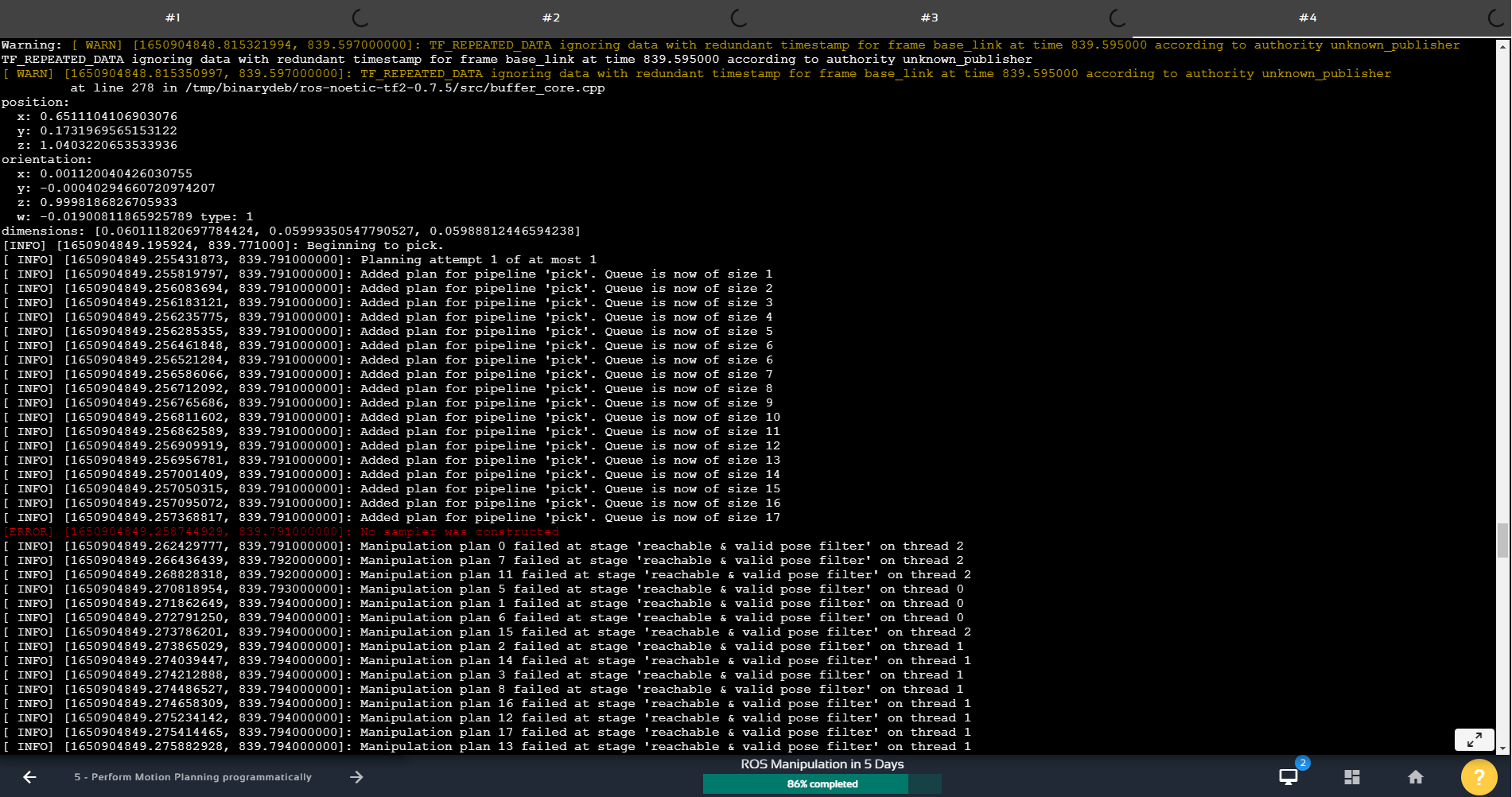
Hi, in exercise 6.2 when I execute roslaunch simple_grasping pick_and_place.launch I got the following error after the object is detected and the robot does not move:
[ INFO] [1623707791.086471480, 983.826000000]: Manipulation plan 2 failed at stage 'reachable & valid pose filter' on thread 2
[ INFO] [1623707791.086763400, 983.826000000]: Manipulation plan 7 failed at stage 'reachable & valid pose filter' on thread 3
[ INFO] [1623707791.086848935, 983.826000000]: Manipulation plan 11 failed at stage 'reachable & valid pose filter' on thread 2
[ INFO] [1623707791.087136135, 983.826000000]: Manipulation plan 15 failed at stage 'reachable & valid pose filter' on thread 3
[ INFO] [1623707791.107516079, 983.837000000]: Manipulation plan 1 failed at stage 'reachable & valid pose filter' on thread 2
[ INFO] [1623707791.130173180, 983.856000000]: Manipulation plan 6 failed at stage 'approach & translate' on thread 3
[ INFO] [1623707791.135179590, 983.860000000]: Manipulation plan 5 failed at stage 'approach & translate' on thread 1
[ WARN] [1623707791.145683310, 983.869000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 9. Try a lower max_step.
[ INFO] [1623707791.146001317, 983.870000000]: Manipulation plan 3 failed at stage 'reachable & valid pose filter' on thread 1
[ INFO] [1623707791.146833652, 983.871000000]: Manipulation plan 10 failed at stage 'approach & translate' on thread 2
[ WARN] [1623707791.157442878, 983.879000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 2. Try a lower max_step.
[ INFO] [1623707791.158679459, 983.880000000]: Manipulation plan 0 failed at stage 'approach & translate' on thread 0
[ WARN] [1623707791.165765262, 983.885000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 2. Try a lower max_step.
[ INFO] [1623707791.172154269, 983.889000000]: Manipulation plan 12 failed at stage 'reachable & valid pose filter' on thread 0
[ INFO] [1623707791.181615388, 983.893000000]: Manipulation plan 14 failed at stage 'approach & translate' on thread 3
[ WARN] [1623707791.182460888, 983.893000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ WARN] [1623707791.184933707, 983.893000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 3. Try a lower max_step.
[ INFO] [1623707791.187158536, 983.895000000]: Manipulation plan 8 failed at stage 'approach & translate' on thread 1
[ WARN] [1623707791.192585341, 983.897000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ WARN] [1623707791.193560827, 983.898000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 2. Try a lower max_step.
[ WARN] [1623707791.201447862, 983.905000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ WARN] [1623707791.201585889, 983.905000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 3. Try a lower max_step.
[ INFO] [1623707791.201657485, 983.905000000]: Manipulation plan 16 failed at stage 'approach & translate' on thread 2
[ INFO] [1623707791.207196630, 983.910000000]: Manipulation plan 9 failed at stage 'approach & translate' on thread 1
[ WARN] [1623707791.208759564, 983.911000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.211285790, 983.913000000]: Manipulation plan 13 failed at stage 'approach & translate' on thread 3
[ INFO] [1623707791.212047639, 983.914000000]: Manipulation plan 4 failed at stage 'reachable & valid pose filter' on thread 2
[ WARN] [1623707791.215394703, 983.918000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.215489079, 983.918000000]: Manipulation plan 17 failed at stage 'approach & translate' on thread 0
[ WARN] [1623707791.218945310, 983.921000000]: All supplied grasps failed. Retrying last grasp in verbose mode.
[ INFO] [1623707791.219172671, 983.921000000]: Re-added last failed plan for pipeline 'pick'. Queue is now of size 1
[ INFO] [1623707791.219931602, 983.922000000]: Orientation constraint satisfied for link 'wrist_roll_link'. Quaternion desired: 0.259278 0.281263 -0.627287 0.678363, quaternion actual: 0.258732 0.283651 -0.627772 0.677128, error: x=0.002818, y=0.003004, z=0.003749, tolerance: x=0.010000, y=0.010000, z=0.010000
[ INFO] [1623707791.219998129, 983.922000000]: Position constraint satisfied on link 'wrist_roll_link'. Desired: 0.640203, 0.338856, 1.183325, current: 0.639639, 0.339071, 1.182638
[ INFO] [1623707791.220075236, 983.922000000]: Differences 0.000563999 -0.000215446 0.000687216
[ WARN] [1623707791.225895175, 983.927000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.228777867, 983.927000000]: Orientation constraint satisfied for link 'wrist_roll_link'. Quaternion desired: 0.259278 0.281263 -0.627287 0.678363, quaternion actual: 0.264025 0.281867 -0.628336 0.675304, error: x=0.007870, y=0.007940, z=0.002936, tolerance: x=0.010000, y=0.010000, z=0.010000
[ INFO] [1623707791.228986305, 983.927000000]: Position constraint satisfied on link 'wrist_roll_link'. Desired: 0.640203, 0.338856, 1.183325, current: 0.639966, 0.337954, 1.183449
[ INFO] [1623707791.229817084, 983.927000000]: Differences 0.000237413 0.000901181 -0.000123408
[ WARN] [1623707791.237117237, 983.929000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.237878372, 983.929000000]: Orientation constraint satisfied for link 'wrist_roll_link'. Quaternion desired: 0.259278 0.281263 -0.627287 0.678363, quaternion actual: 0.260180 0.284854 -0.626844 0.676928, error: x=0.002777, y=0.007044, z=0.002544, tolerance: x=0.010000, y=0.010000, z=0.010000
[ INFO] [1623707791.237952729, 983.929000000]: Position constraint satisfied on link 'wrist_roll_link'. Desired: 0.640203, 0.338856, 1.183325, current: 0.640710, 0.338788, 1.182677
[ INFO] [1623707791.238111078, 983.929000000]: Differences -0.000507383 6.72366e-05 0.000648808
[ WARN] [1623707791.243945588, 983.933000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.244501654, 983.933000000]: Orientation constraint satisfied for link 'wrist_roll_link'. Quaternion desired: 0.259278 0.281263 -0.627287 0.678363, quaternion actual: 0.256562 0.281476 -0.630616 0.676218, error: x=0.000982, y=0.003634, z=0.008848, tolerance: x=0.010000, y=0.010000, z=0.010000
[ INFO] [1623707791.244583100, 983.933000000]: Position constraint satisfied on link 'wrist_roll_link'. Desired: 0.640203, 0.338856, 1.183325, current: 0.640700, 0.339474, 1.183757
[ INFO] [1623707791.244639229, 983.933000000]: Differences -0.000496605 -0.000618717 -0.000431762
[ WARN] [1623707791.250935855, 983.939000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.254245737, 983.942000000]: Orientation constraint satisfied for link 'wrist_roll_link'. Quaternion desired: 0.259278 0.281263 -0.627287 0.678363, quaternion actual: 0.258757 0.281946 -0.630291 0.675488, error: x=0.001618, y=0.000326, z=0.008330, tolerance: x=0.010000, y=0.010000, z=0.010000
[ INFO] [1623707791.254893815, 983.942000000]: Position constraint satisfied on link 'wrist_roll_link'. Desired: 0.640203, 0.338856, 1.183325, current: 0.639930, 0.339556, 1.183495
[ INFO] [1623707791.255766953, 983.942000000]: Differences 0.000273425 -0.000700028 -0.000169281
[ WARN] [1623707791.262485339, 983.948000000]: The computed trajectory is too short to detect jumps in joint-space Need at least 10 steps, only got 6. Try a lower max_step.
[ INFO] [1623707791.262564184, 983.948000000]: Manipulation plan 17 failed at stage 'approach & translate' on thread 2
[ INFO] [1623707791.263019476, 983.948000000]: Pickup planning completed after 0.143000 seconds
[ERROR] [1623707791.265799, 983.949000]: Pick failed in the planning stage, try again...
[ INFO] [1623707791.946623349, 984.465000000]: Planning attempt 1 of at most 1
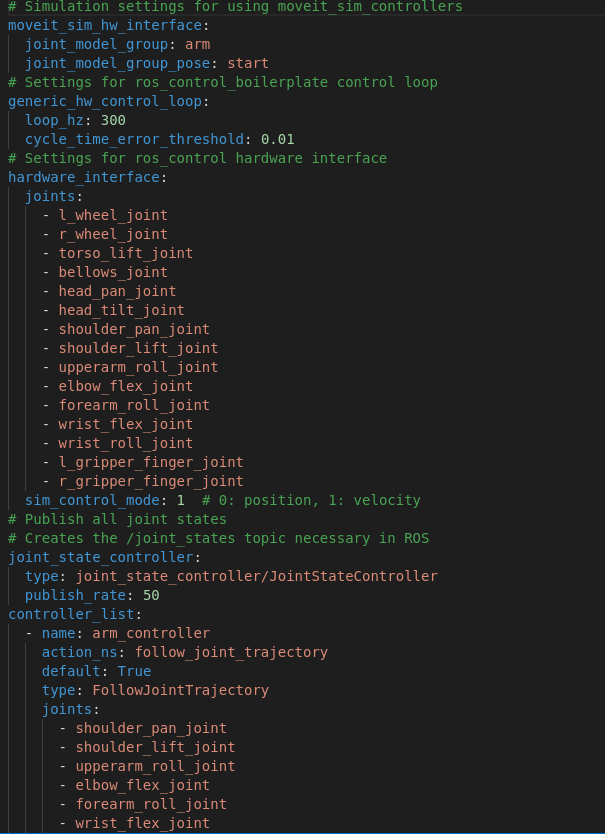
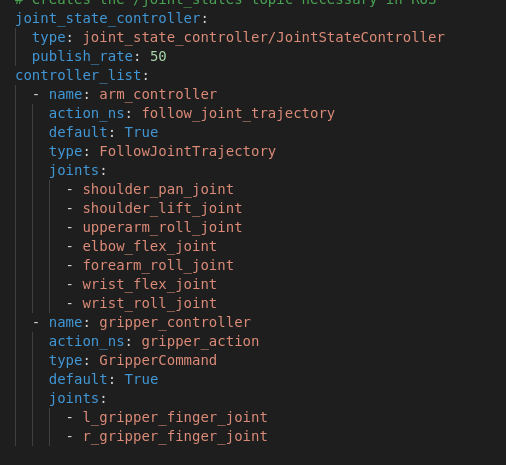
These are my controllers, everything seems to be okay:
Thanks in advance!