I read that the project for TF ROS2 in Unit 5 needs 5 shells
How to extend another shell? If not, which commands can be skipped in order to run the project properly in with just 4 shells?
I read that the project for TF ROS2 in Unit 5 needs 5 shells
How to extend another shell? If not, which commands can be skipped in order to run the project properly in with just 4 shells?
Hi @PhongNguyen ,
You do not have to skip commands. What you can instead do is: you can send the terminal that runs RVIZ to the background by doing Ctrl+Z on that terminal. Your RVIZ will continue running in the background and you can use the same terminal for another command.
Hope this helps. Let me know if this worked for you.
Regards,
Girish
Hi @girishkumar.kannan,
How can I terminate a background task then (in this case is RVIZ)?
Should I just close it in the simulation window?
Also @girishkumar.kannan,
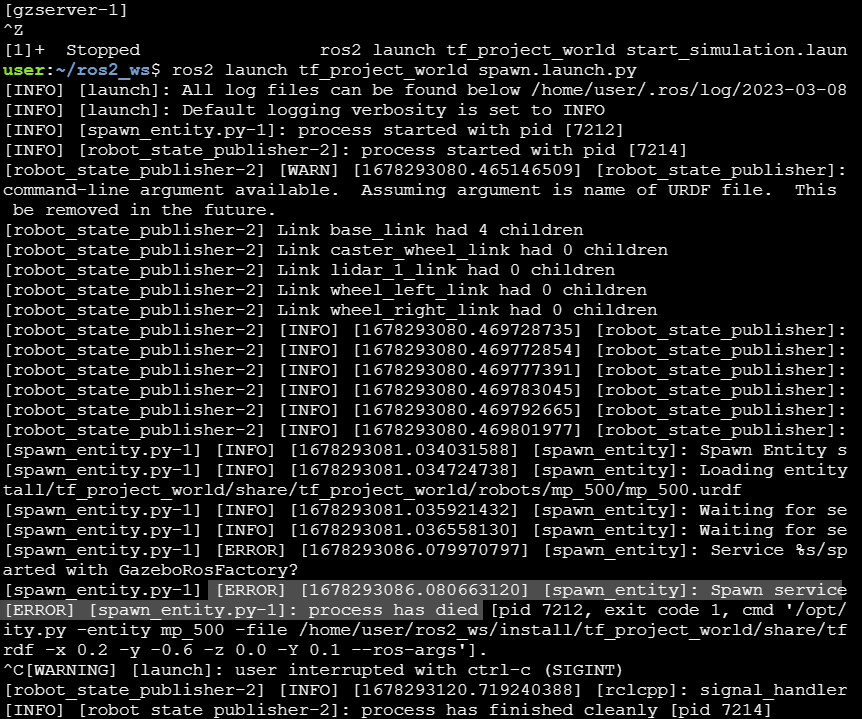
In unit 5, we use a gazebo server instead of RVIZ:
I tried the Ctrl + z for terminal 1 but it will stopped the gzserver and cannot spawn the robot.
My idea here is to run commands should be in Shell#2 after the Ctrl + z in Shell#1
Hi @PhongNguyen ,
To say it in simple words, Yes. You just close the Rviz window when you are done.
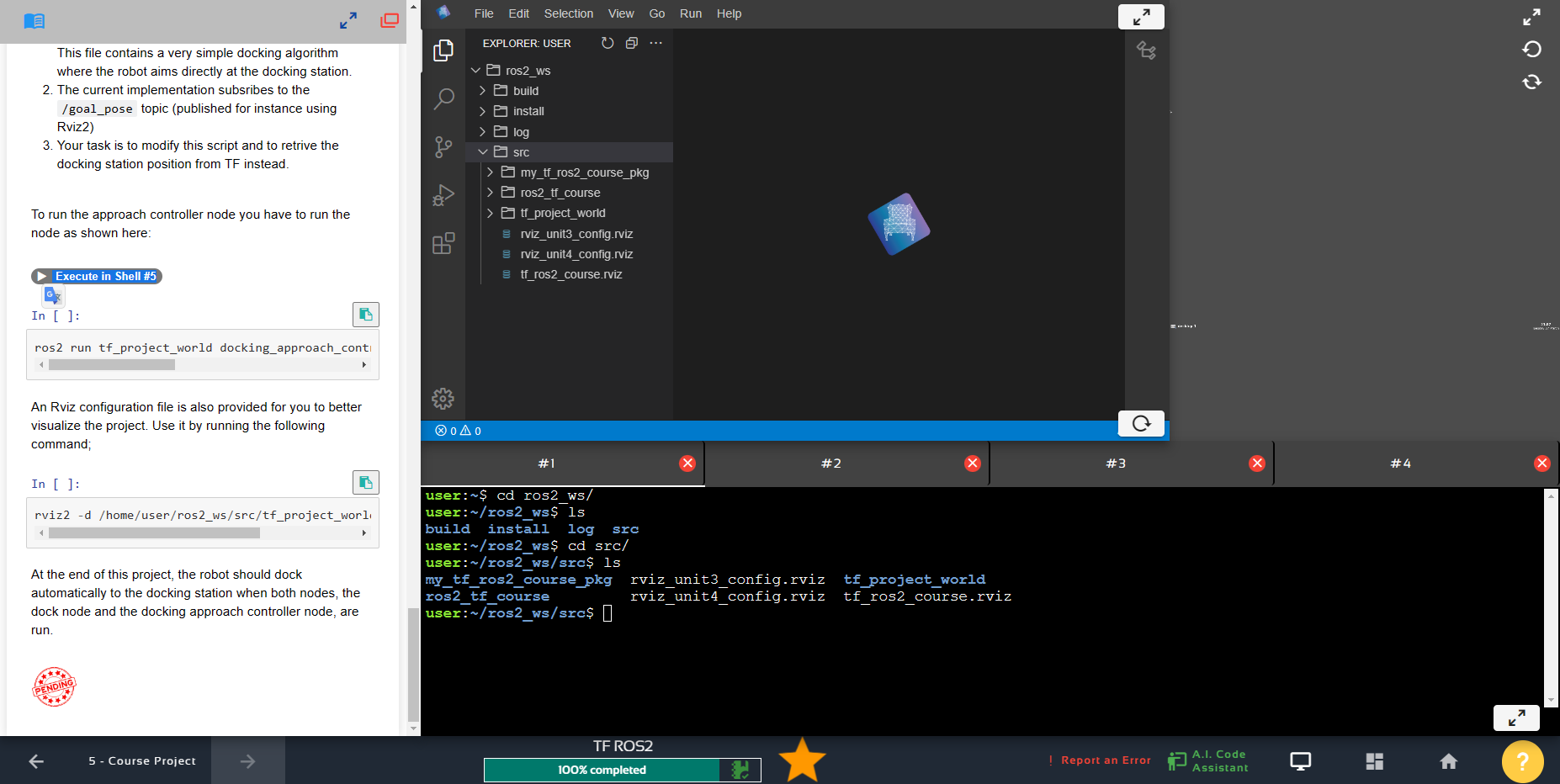
You can combine command 2 and 3 in one terminal.
Command 2 just spawns the robot. I guess it is one single spawn (and not multiple spawns).
So just execute command 2 and then execute command 3.
So you can stick to using 4 terminals without doing Ctrl+Z for Rviz!
I do not know what error you are getting. So I cannot help you with that at the moment.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.