When I spawn the urdf table, it looks correct, but the robot cart is always facing 45 degrees away from the cart. How can I get the cart to directly face the table, so that it looks like the way it is depicted in the notebook instructions?
Hello @JoshBurns ,
The robot slips a little bit, which causes this offset in the orientation over time. What I suggest is that you reset the initial robot’s position by using the Reset robot position button in the simulation window:
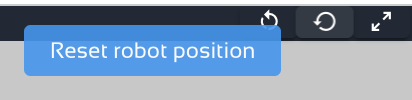
That will set the robot to its initial position and orientation.
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.