I get the following message error when I execute the command “ros2 run tf2_ros tf2_echo rgb_camera_link_frame turtle_chassis”:
[INFO] [1674581050.764495696] [tf2_echo]: Waiting for transform rgb_camera_link_frame → turtle_chassis: Invalid frame ID "rgb_camera _link_frame" passed to canTransform argument target_frame - frame does not exist
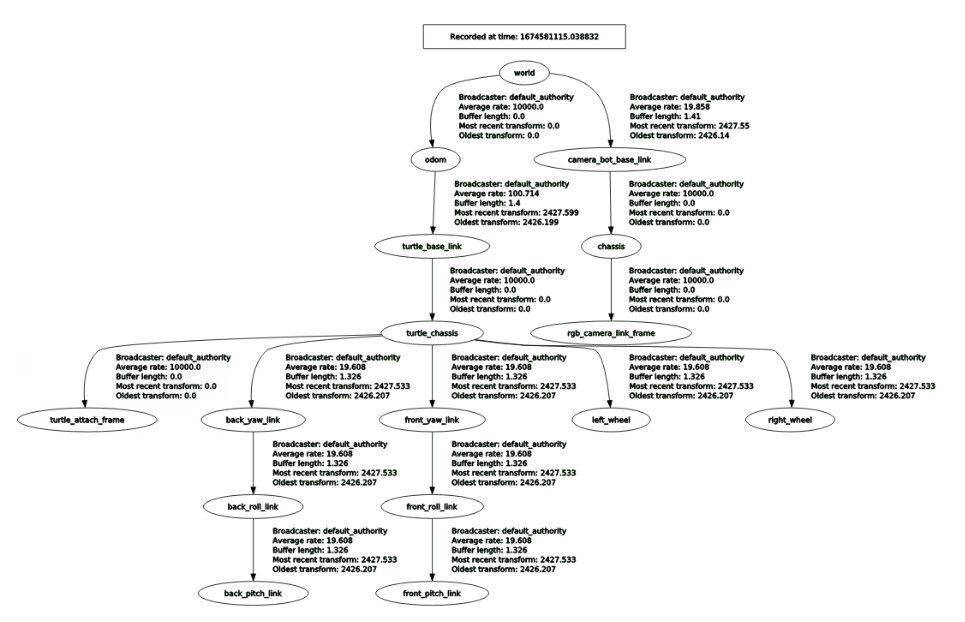
But I have checked the TF tree and the frame exist:
Hi @duckfrost2, was first also puzzled since I could not find a turtle_chassis frame, but then I realized that the other robot does indeed has a turtle_chassis frame.
@joseecm
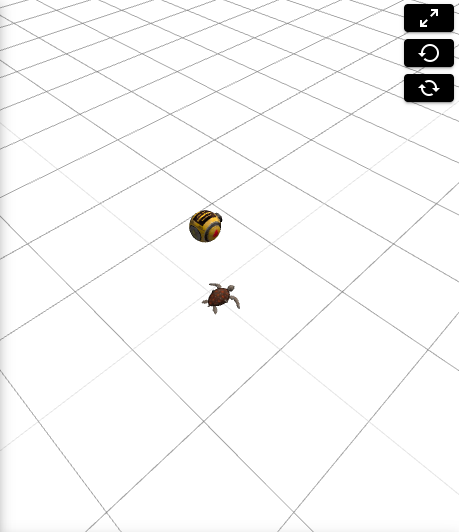
Could you please confirm that you see both robots in the simulation?
This is how the simulation window should look like:
So the message that you see should be the very first message, but after a while of waiting you should see the transform printed at certain intervals of time. Like so:
Could you please re-run the command again? In some rare situations re-running a command helps.
You have to wait approximately 10 seconds. It will start showing the transforms. Normally, the first message says it does not exist, this is because the TF system needs a bit of time for synchronization.