Hello!
can someone xplain these two points?
- If we post-multiply, the Z rotation is intrinsic, it is applied to the current coordinate frame (the can rotates about the axis of the cylinder).
- If we pre -multiply, the Z rotation is extrinsic , and it is applied to the fixed coordinate frame (the z-axis normal to the planar grid).
Thanks
Hi,
EXtrinsic = The reference frame we use for the rotations of that SolidObject is the WORLD frame
Intrinsic = The reference frame we use for the rotations is a certain reference frame that is NOT the WORLD frame
EXample:
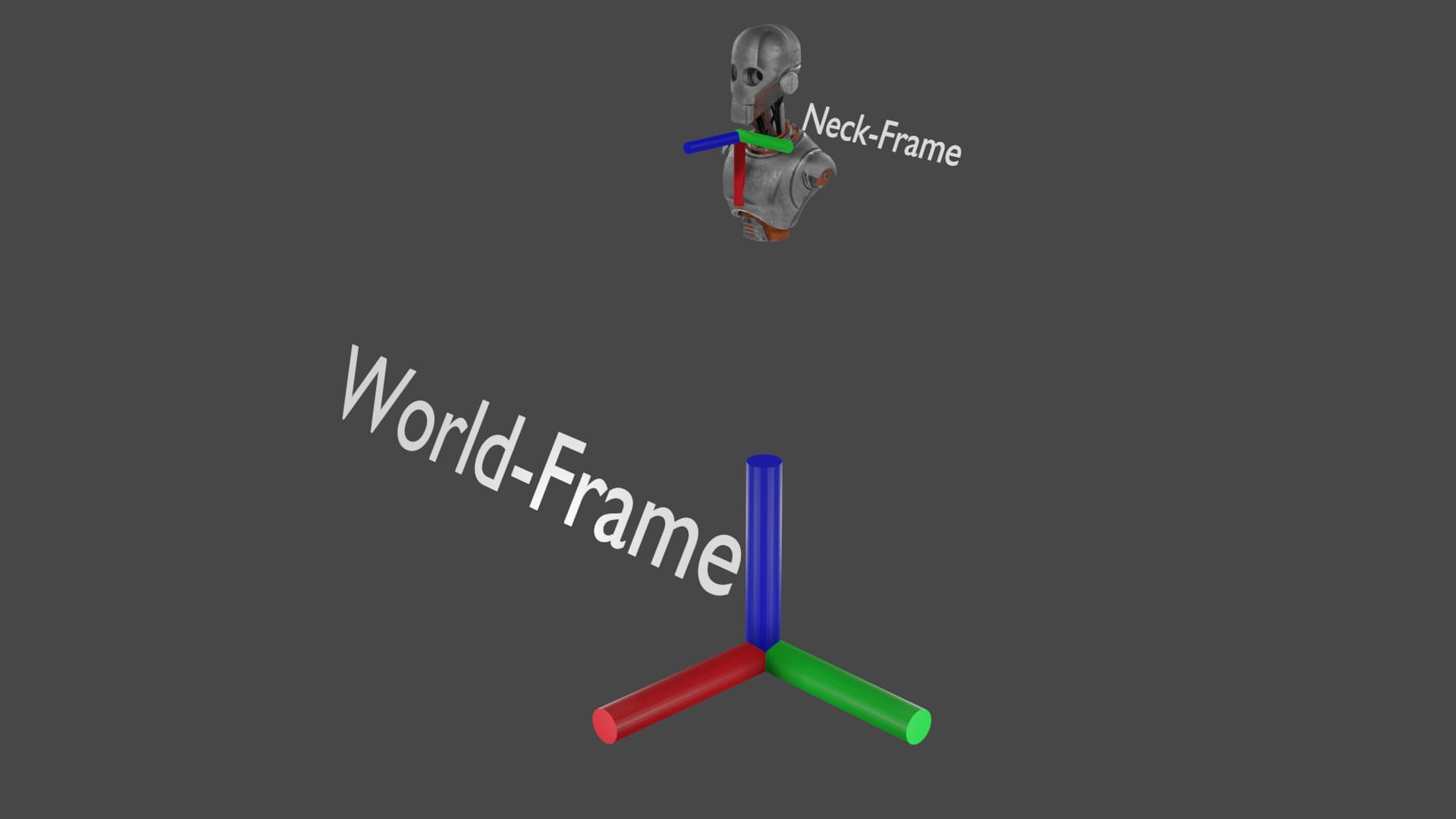
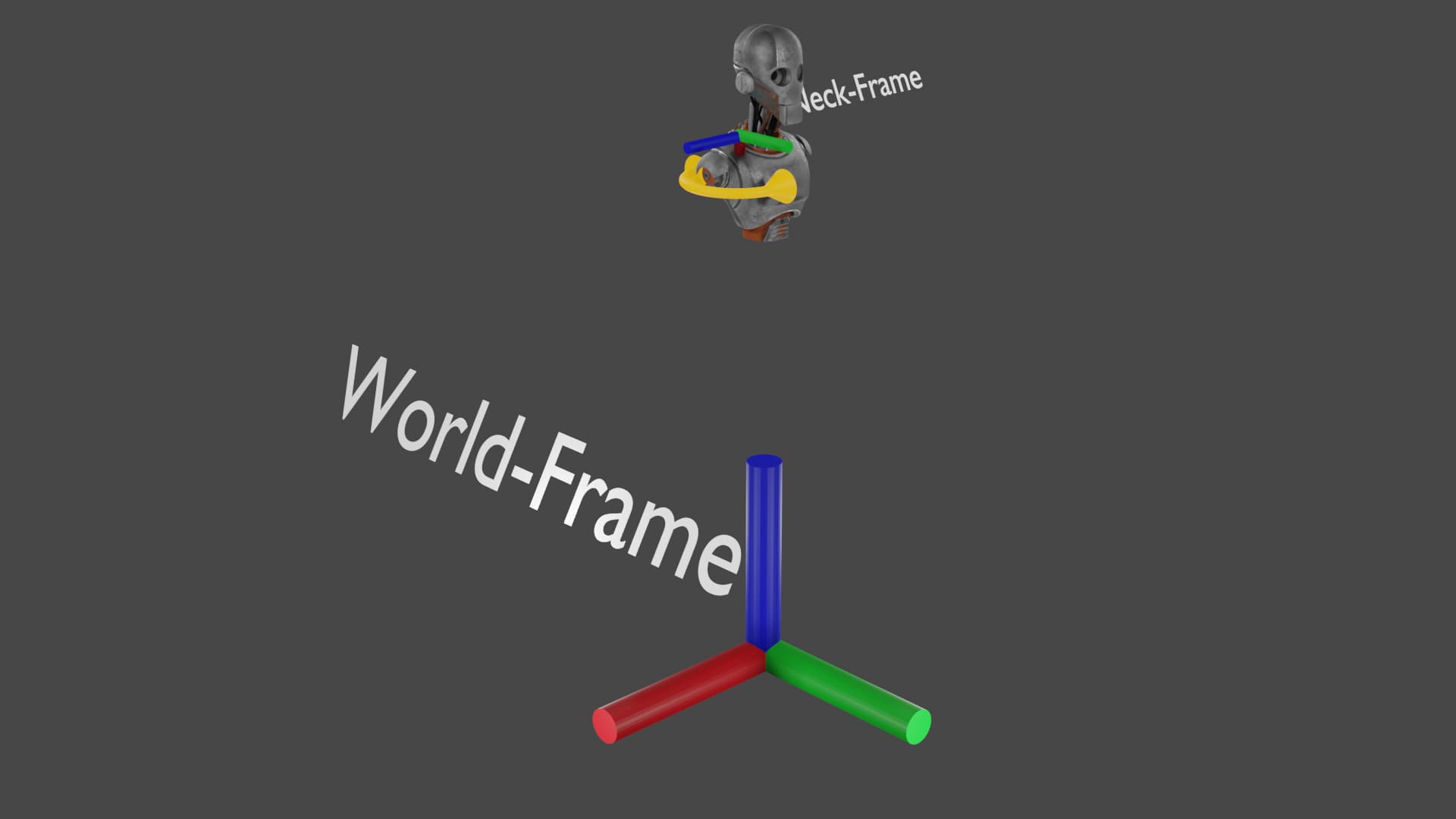
- In these images you can see two frames: The World frame, and the Neck_frame.
If we rotate around the X axis o the World frame ( EXtrinsic) it turns like in the second image.
If we turn around the Nack frame ( Intrinsic) we turn as in the third image.
So Extrinsic means global frame and Intrinsic is like local frame. Thanks for explaining through images…
1 Like