@staff
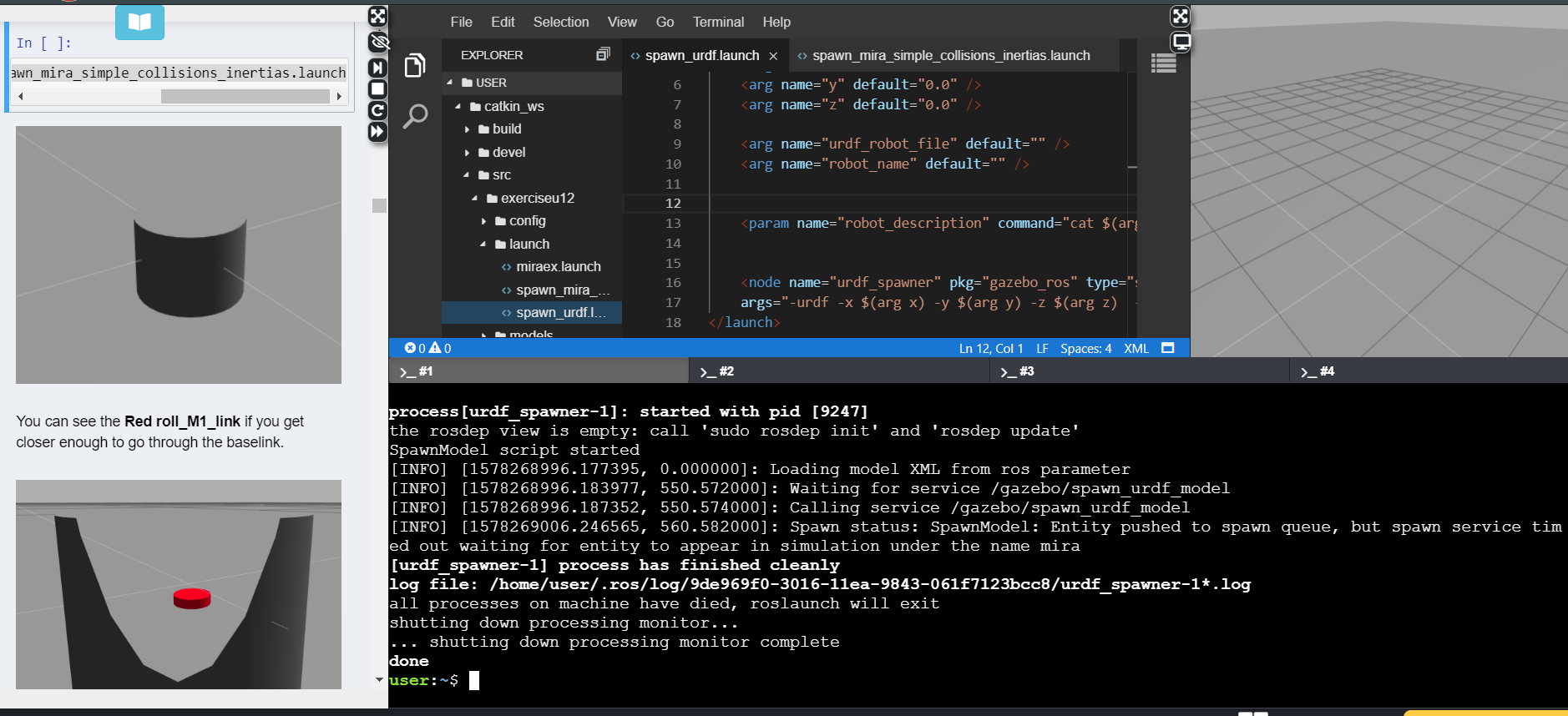
The services are successfully called, However, the model is not showing in the simulator.
I went through the previous thread and tried the suggested refreshing workspace by going into another lesson, but it didn’t work.
@staff
The services are successfully called, However, the model is not showing in the simulator.
I went through the previous thread and tried the suggested refreshing workspace by going into another lesson, but it didn’t work.
Hi @vasank1958,
Could you please try changing to another course and then coming back to this one? By the way, could you please tell us which Course you are on?
Sir I am doing both URDF and TF . I tried changing course same issue .
The package in URDF lesson where the error occurs is exerciseu12.
@bayodesegun @duckfrost sir the issue is still unresolved, I am not able to proceed to next lesson without completing this please help?
github link of my workspace: https://github.com/shivauchiha/ROS_Solutions_Robot_ignite_academy.git
please download the URDF_ws.rar
Hi,
I’ll check that and see where is the problem.
For some strange reason its not spawning , let me try some other stategy to see whats wrong here… Let me return to you ths afternoon
You had sme straneg placing of he gazebo tag and some other changes, here is the urdf that should spawn what you are looking for.
<?xml version="1.0"?><material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="red">
<color rgba="0.8 0 0 1"/>
</material>
<link name="base_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.18" />
<inertia ixx="0.0002835" ixy="0.0" ixz="0.0" iyy="0.0002835" iyz="0.0" izz="0.000324"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="base_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
</gazebo>
<link name="roll_M1_link">
<!-- Inertial for gazebo to take it into account, Put 1gr weight -->
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.001" />
<inertia ixx="2.70833333333e-08" ixy="0.0" ixz="0.0" iyy="2.70833333333e-08" iyz="0.0" izz="5e-08"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.01"/>
</geometry>
<material name="red"/>
</visual>
</link>
<gazebo reference="roll_M1_link">
<kp>1000.0</kp>
<kd>10.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Red</material>
</gazebo>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
I got it t spawn without any issue.
Please tell me if it worked for you
What is the root link in the above script? We were asked to provide a root-link in Exercise 2.0 and it is supposed to not have any inertias.
Hi just answered you in the other post but, you can set a root link just like to suggested in that post:
<?xml version="1.0"?>
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/Grey</material>
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/White</material>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.01"/>
</geometry>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.18" />
<inertia
ixx="0.0002835" ixy="0.0" ixz="0.0"
iyy="0.0002835" iyz="0.0"
izz="0.000324"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
</collision>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
<!--mesh filename="package://my_mira_description/models/mira/meshes/mira_body_v3.dae"/-->
</geometry>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.01" />
<inertia
ixx="0.0000000270833" ixy="0.0" ixz="0.0"
iyy="0.0000000270833" iyz="0.0"
izz="0.00000005"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.01" length="0.005"/>
</geometry>
</visual>
<joint name="free_joint" type="fixed">
<parent link="root_link"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>