Hi,
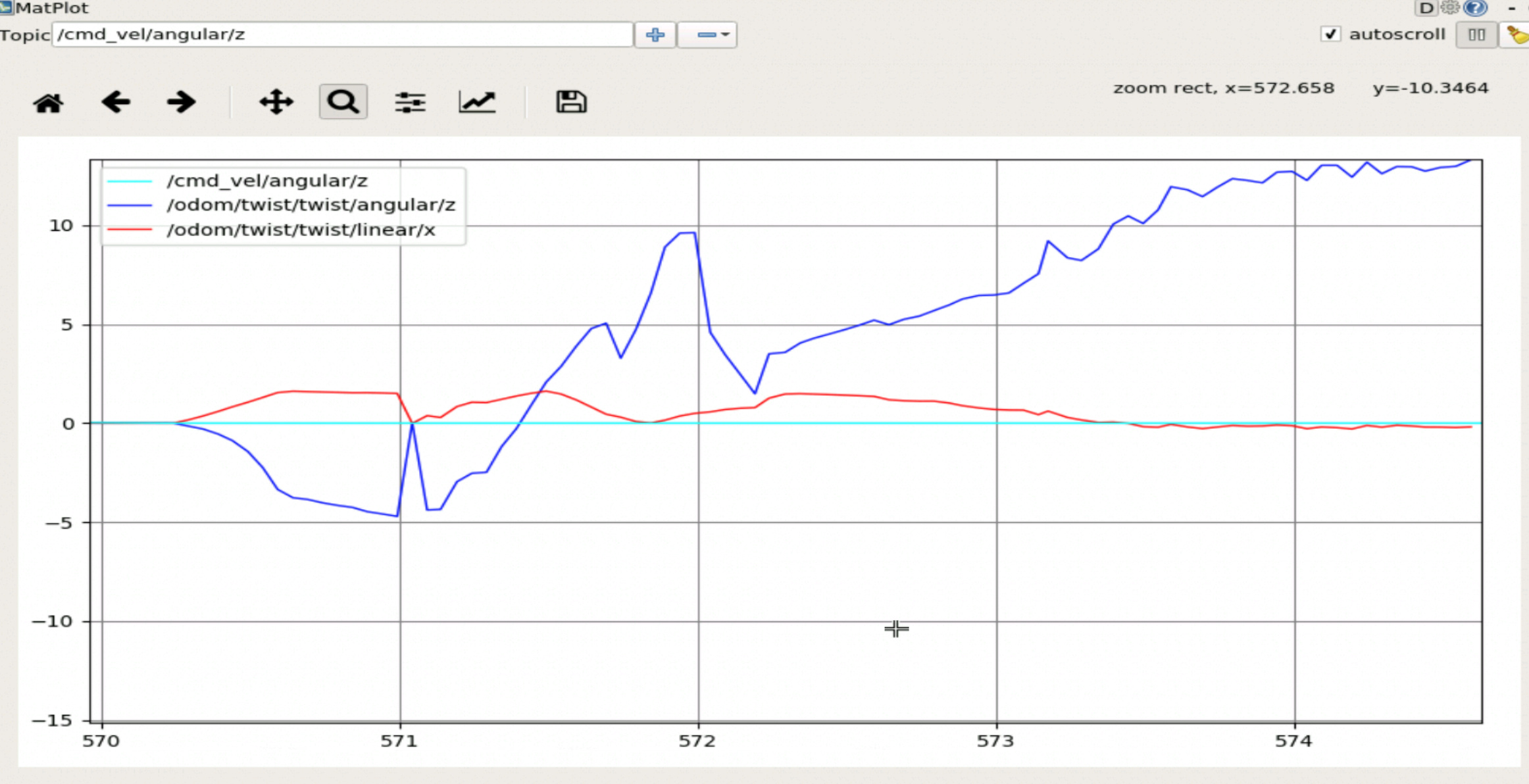
I have the problem that oftentimes the turtlebot seems to just spin out of control while moving forward. I tried increasing the speed incrementally, but that didn’t work either. In the graph you can see what i’m talking about. Any Ideas?
Hi Simon,
Could it be that you have some “secret” processes (such as terminal programs that have not been stopped) publishing to it? You can check the /cmd_vel topic to the publishers on it.
One other thing you can also try is to intentionally publish “stop” at specific times, such as when turning. I can imagine that if you keep bombarding the bot without slowing down or stopping at times, it might spin out of control, just like a real vehicle will.
the graph shows the /cmd_vel/angular/z , nothing is spinning it. I managed to somewhat diminishing the problem by slowing down my main loop to 10hz. However, any linear speed above 2 makes it freak out, even with the 10hz
You are using linear speeds up to 2.0? WOW, that’s huge, and speed kills ![]() ! If I were me, I wouldn’t do more than
! If I were me, I wouldn’t do more than 0.2-0.6…
well it works with 2 and 10hz loop, that’s how I get 11 seconds… but I wanna go faster 
1 Like
Okay then, as long as you can live with the “freaking outs”. But please, don’t try that in real life  .
.
1 Like
I realize that I am late here but this might help someone else:
I had a similar problem but then I realized that I had two nodes publishing to velocity command, one was the node I created, and other was teleop_keyboard. So by removing the teleop_keyboard node, I could control the turtlebot normally
1 Like