I’m having a lot of trouble getting a decent map in the course project.
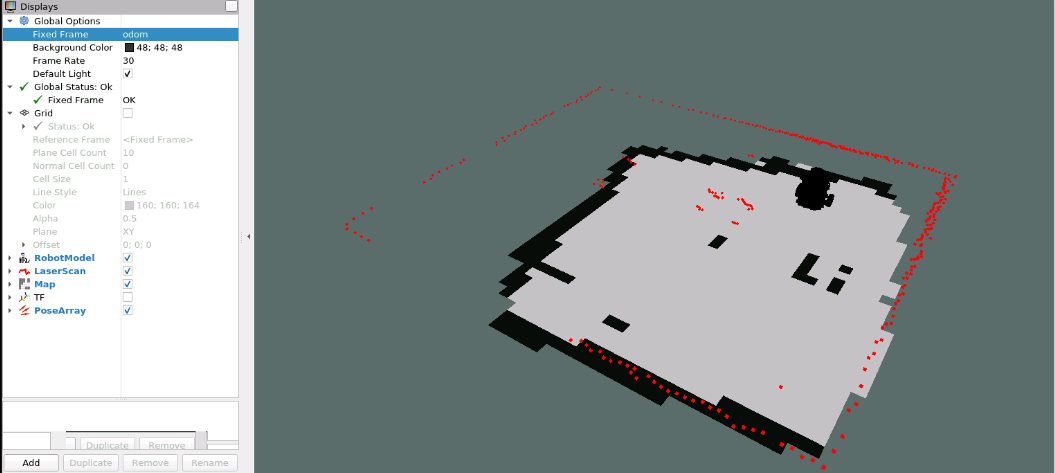
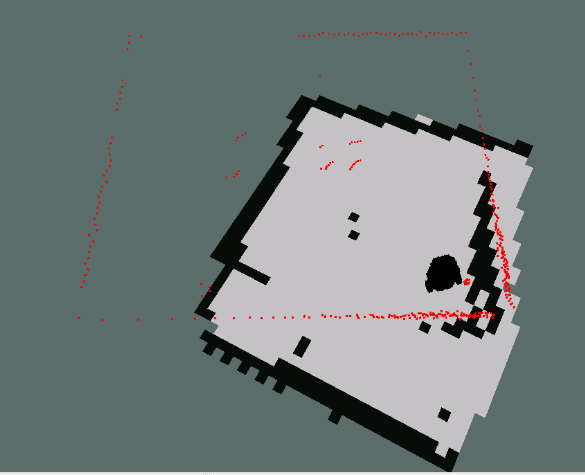
From the Rviz window, it appears that the calibration of the odometer is very far off. The dimensions of the sides of the rectangle traced out by the laser are much larger than the size of the rectangle according to the odometer. gmapping tries to handle it, but ends up mangling what it has already drawn in order to reconcile it.
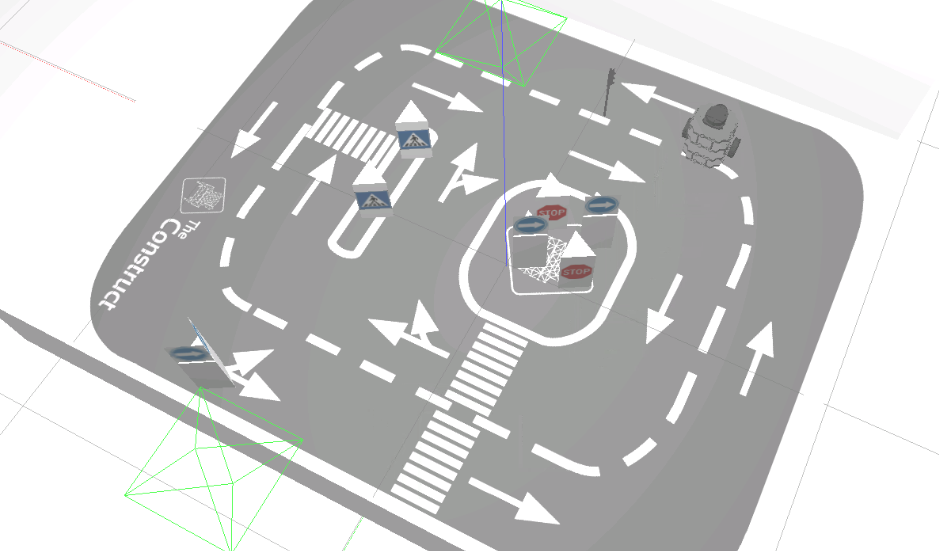
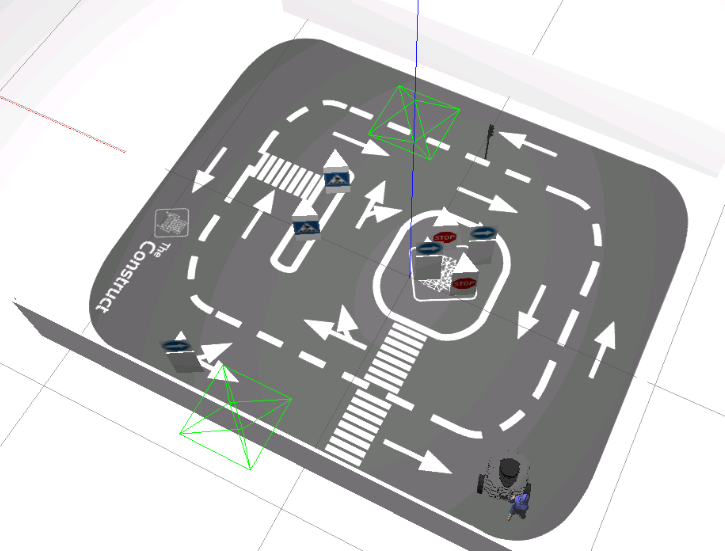
I started driving the robot in the lower left corner (where it says “The Construct”) then in an across and back (zig-zag) pattern as if mowing the lawn. After driving across and back 3 times, the robot ended up in the position shown below.
The resulting map is a total mangled mess. Is there something that I can do to make this work better?